#ThugLifeRobot
Hey amigos allí,
Hoy voy a mostrarles chicos cómo utilizar controladores de RC y decodificar sus señales para cualquiera de tus proyectos
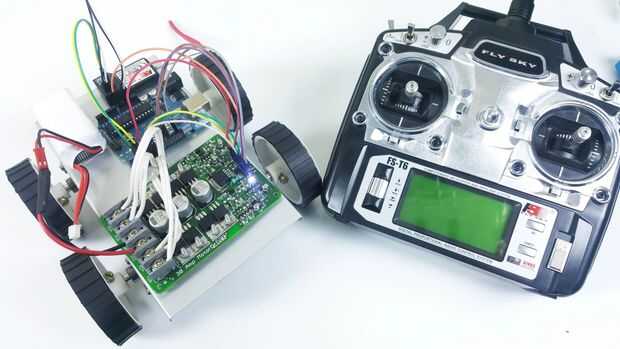
Como muchos de los que saben que podemos directamente utilizar servomotores con receptores RC desde servos uso PPM (modulación de posición de pulso) señales como insumos para operar, para que descodificación de las señales que podamos utilizar transmisores y receptores RC para crear una variedad de proyectos sin hilos...
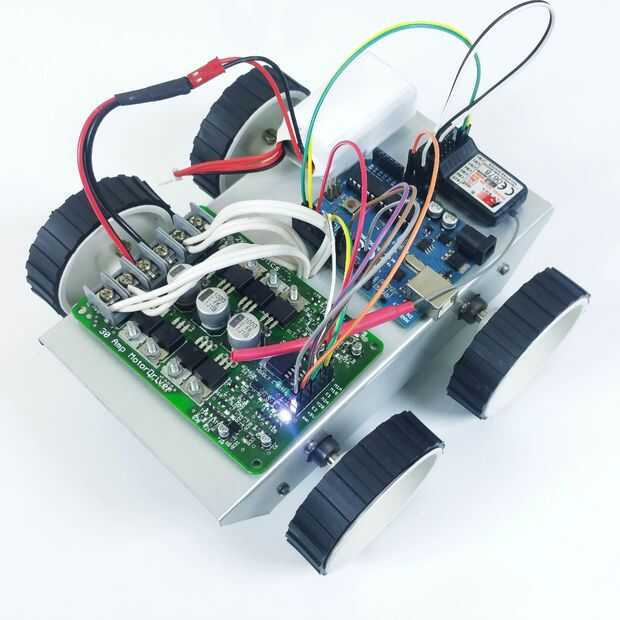
Para demostrar esto que usaremos un robot de impulsión (4WD) 4 ruedas... para conducir las ruedas estamos utilizando cuatro motores de la C.C., y son controlados utilizando un controlador de motor que opera en las señales de PWM (Pulse Width Modulation). Vamos discute la diferencia entre PWM y PPM en próximos pasos.
Así permite empezar!!!!!!
 Modelo de elevador usando Arduino, App Inventor y otros software libre")






")





")