Paso 2: Diferencia entre ppm y pwm
PWM y PPM son dos palabras comunes utilizadas en la industria de R/C. Significa modulación de anchura de pulso PWM y PPM para modulación de posición de pulso. Algunos dispositivos que usan PWM para el control son ESC (control electrónico de velocidad) y servos. PWM es una técnica utilizada para datos de relé en forma de un ancho de pulso variable.
Usted puede estar ya familiarizado con binario, de 1 y 0; donde un 1 se representa como 'on' y 0 como 'off'. Un ejemplo de esto sería un interruptor de la luz. Encender el interruptor indicaría un 1, un 0. En el caso de una señal PWM/PPM, una tensión aplicada indica un 1 y viceversa. Sin embargo, en el caso de R/C electrónica 'encendido' datos no es suficiente, aquí es donde el ancho de pulso.
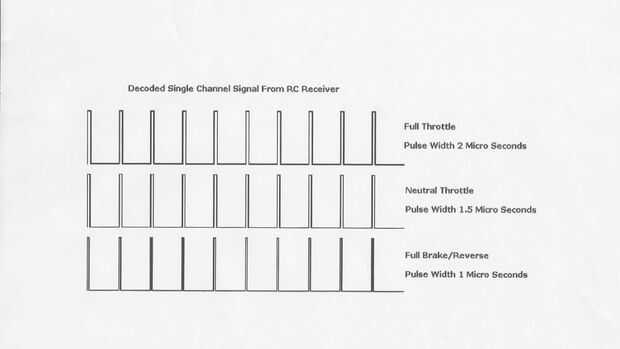
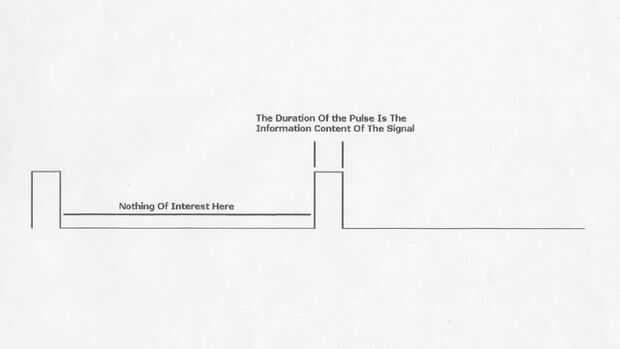
La forma en que transmitir datos a un servo por ejemplo es el tiempo que el pulso está en. En el caso de R/C electrónica este tiempo es generalmente alrededor 1 a 2 milisegundos. Un servo o ESC controlar este impulso y empiezan a contar cuando se detecta el pulso y dejar de contar cuando el pulso se detiene. El tiempo que el pulso está en determinar la posición del servo. Por ejemplo, enviar un servo un 1ms pulso hará que el servo swing totalmente izquierda mientras un 2ms pulso hará pivotar el brazo derecho totalmente.
Generalmente en equipos de R/C un pulso PWM completo durará un total de 20ms. El pulso entero se llama un marco. Un marco de completado incluye tanto el tiempo del pulso es alto (1-2 ms) y el tiempo que el pulso es bajo. La imagen de abajo representa un cuadro típico de PWM.
Aparte el servo ganando energía de tenencia, la razón para el marco 20ms sólo es tener la capacidad para alinear varias señales PWM en el mismo marco. Como dije antes, el tiempo que el pulso está en lo importante es porque somos capaces de despojar a este los datos pertinentes de un marco PPM para volver a generar un marco PWM. Por ejemplo, si una radio envía sólo 1 la señal de PWM en un momento, tarda 20ms por canal. Si usted tiene un radio de 8 canales cada actualización llevaría 160ms. Los mismos datos pueden ser embalados en un marco PPM y sólo llevará 20ms por actualización. Transmisores y receptores son los dos dispositivos más comunes de R/C que utilizan PPM.
Las siguientes son las listas de dispositivos comunes que utilizan PPM y PWM.
R/C dispositivos que utilizan pulsos de PWM:
Servos
Controladores de velocidad electrónicos
Interruptores de R/C
Luces de R/C
Receptores de R/C
Registradores de datos
De a prueba de fallos
Sistemas de piloto automático/estabilización
Servo controlador
R/C dispositivos que utilizan pulsos PPM:
Transmisores de R/C
Sistemas de receiversAutopilot/estabilización de R/C
PCTx
 Modelo de elevador usando Arduino, App Inventor y otros software libre")






")





")