Paso 4: Alambre para arriba y calibrar!
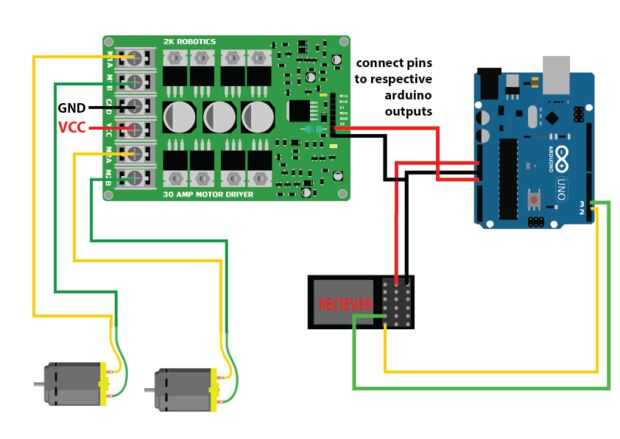
Conecte todos los módulos y componentes juntos (ver imagen arriba para las conexiones también a continuación)
las conexiones son:
CONTROLADOR de MOTOR -> ADUINO
- M1A -> arduino pin5
- M1B -> arduino pin6
- ENABLE1 -> arduino pin10
- M2A -> arduino pin7
- M2B -> arduino pin8
- ENABLE2 -> arduino pin11
- GND -> gnd de arduino
- + 5v -> arduino vcc
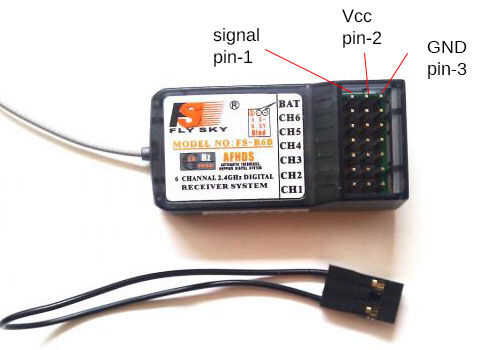
RECEPTOR -> ARDUINO
- CH1 -> pin 3
- CH2 -> pin 2
- GND -> GND
- + -> 5V + 5V
Instale motores a ranuras correspondientes en el controlador de motor
también la energía todo arriba conectando la batería a GND y VCC de conductor del motor
Quema el código
- descargar el archivo adjunto y abrirlo en el ide de arduino
- Seleccione el tipo de junta (Herramientas -> Tabla -> Arduino uno)
- Seleccione el puerto COM (Herramientas -> el puerto -> al puerto está conectado el arduino )
- Haga clic en compilar (para verificar los errores de código, aunque está libre de errores pero es bueno controlar siempre ;))
- grabar el código haciendo clic en el botón subir
Tiempo de calibración!
- generalmente la señal PPM da un valor de 1000 a 2000 como vimos en el paso PPM y PWM
- pero es el valor ideal de un remote(TX) ideal
- así que tenemos que calibrarlo
Siga los pasos siguientes para calibrar el mando a distancia
- después de subir el código a arduino y todo el cableado hecho, haga clic en el monitor serial en arduino IDE
- Nota valor inactivo y pluma los valores de ralentí
- Mueva el regulador de velocidad arriba y abajo y también la pluma abajo esos valores también
- en código en la parte superior se puede ver "#define THROTTLE_SIGNAL_IN_PIN 2" en la línea 2
- hay pin 2 se refiere a la clavija pin conectado arduino 2
- para comprobar el calibre la mirada sólo cambiar "2" a "3" después de calibración para la válvula reguladora
- Repita el paso 1, 2 y 3 para mirando también
- ahora se hace parte de calibración!!!
 Modelo de elevador usando Arduino, App Inventor y otros software libre")






")





")