

Ver en 720p
Necesita algunas habilidades de pre-requisito:
- Cómo utilizar Arduino, lo suficiente como para empezar
- Soldadura, cableado, conocimientos básicos de electrónicas
- Funcionamiento de la herramienta de mano básico
Un helicóptero cuadrotor vuela con 4 hélices de giro en un marco en forma.
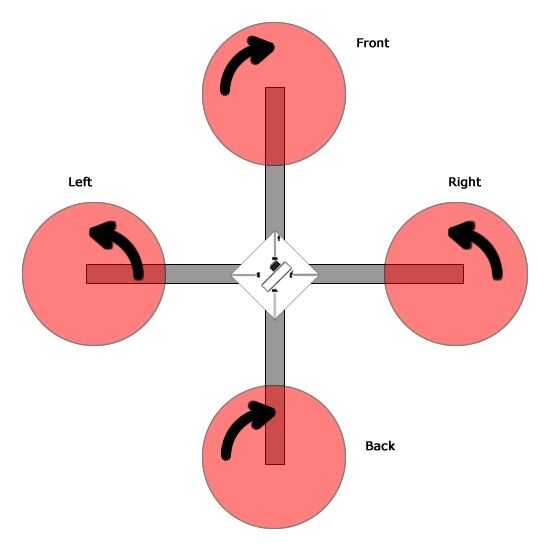
Cuando un rotor gira más rápido que el rotor en el lado opuesto, el lado más rápido tendrán más elevación y así se inclina el helicóptero. Cuando el helicóptero está inclinado, el aire es soplado ligeramente hacia los lados en vez de directamente hacia abajo, y el helicóptero se moverá.
Las hélices también deben ser en pares contrarrotatorios, dos vuelta hacia la derecha y dos vuelta en sentido antihorario. Así, el helicóptero no gira sobre el eje vertical ya que la rotación enertia es anulado. Pero cuando la pareja que está girando en una dirección es más rápida que el otro par, el helicóptero que gira sobre el eje vertical. Esto es cómo el helicóptero controla su dirección.
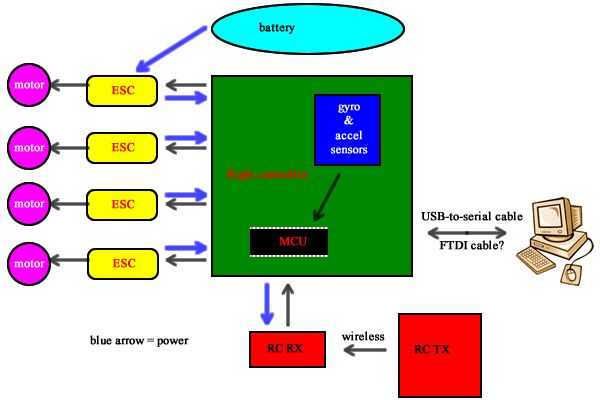
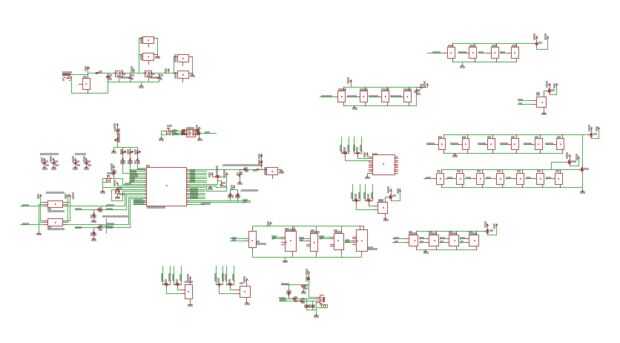
Construirá un circuito de controlador de vuelo que contiene un sensor de acelerómetro y giroscopio para que un microcontrolador puede detectar cambios no deseados en el ángulo del helicóptero y ajustar la velocidad de cada rotor en consecuencia para contrarrestar la variación. Este microcontrolador hará esta cientos de veces por segundo, manteniendo el helicóptero estable en el aire.
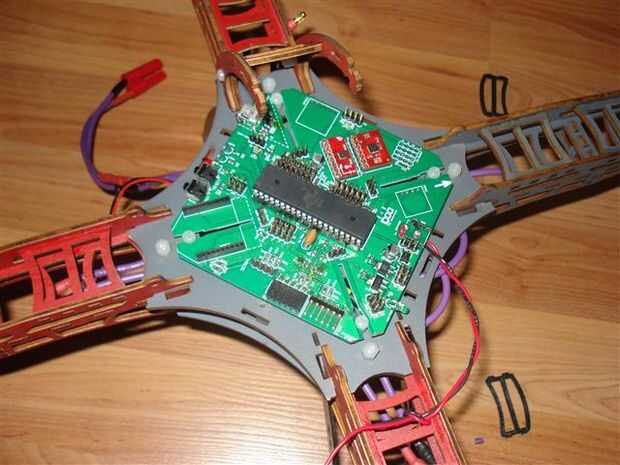
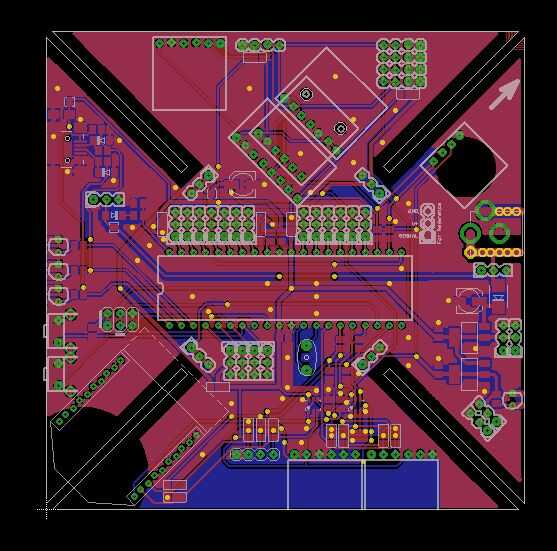
El controlador de vuelo es un circuito completamente abierto. El circuito esquemático y los PCB archivos son proporcionados. El controlador de vuelo es totalmente compatible con Arduino. El código fuente es una versión modificada de AeroQuad (Abra la fuente código de control Arduino basado quadrocopter). Utilidad de configuración de AeroQuad pueden regularse las características de vuelo.
Se adjunta es un diagrama que muestra la dirección de giro de cada motor, recuerde que este diagrama! Usted no será capaz de volar si su configuración no sigue este esquema.
Este microcontrolador también tendrá entrada de un receptor de radio RC, para que puedas controlar el helicóptero desde el suelo utilizando un transmisor de radio RC.
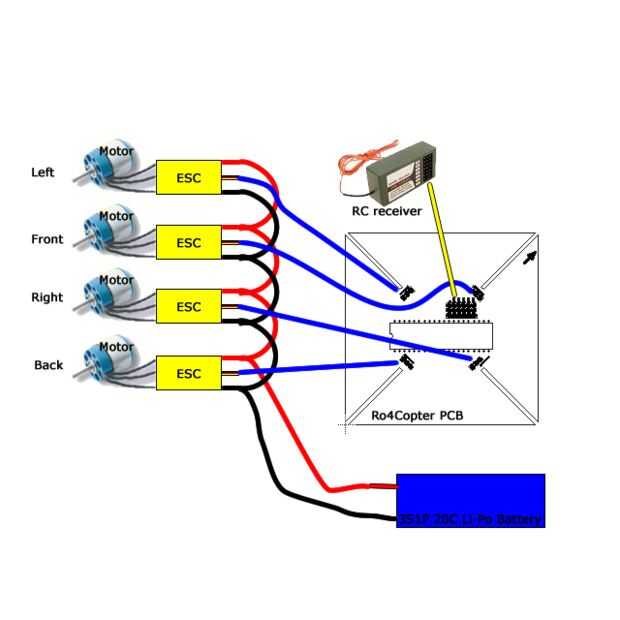
Este helicóptero a utilizar cuatro motores sin escobillas. Cada motor estará controlado por un ESC (controlador electrónico de velocidad). Los CES estará controlados por el microcontrolador.
Una batería de polímero de litio potencia el chisme entero.
Resumen de las descargas:
- Más de 100 fotos en todos los pasos
- Paso 9 contiene el circuito controlador de vuelo y los archivos PCB
- Paso 10 contiene cargador y base para microcontrolador
- Paso 12, 13, 14 contiene bocetos de Arduino demo
- Paso 26 contiene el software de control de vuelo





![Control remoto de 2 canales sin IC [bueno para helicópteros!]](https://foto.askix.com/thumb/170x110/2/bf/2bf78721622eb49c1924bf372dc2a9ad.jpg "Control remoto de 2 canales sin IC [bueno para helicópteros!]")



 helicóptero del vuelo.")

")
")
")