Paso 15: Principio de Control
Uno es donde se omite el acelerómetro, y controlar velocidad angular del helicóptero con el joystick. Esto es referido como modo "acrobacia". El modo es en, trabajo del código es para girar el helicóptero cuando desee y deje de girar cuando no. La ventaja de este modo es que puede realizar acrobacias como flips y los rodillos de barril.
El otro modo es donde se utiliza el acelerometro con el sensor giroscópico para calcular el ángulo actual del quadcopter con respecto a la tierra. Usted controla el ángulo de lo quadcopter en su lugar. Así que en este modo, si se suelta la palanca de mando, el quadcopter debe permanecer en un nivel horizontal. Si mueve el joystick a una ubicación, el quadcopter hará girar en un ángulo, entonces alojarte en ese ángulo (y mover ya que es el aire que sopla en un ángulo en lugar de hacia abajo). Este modo es como modo de "estable" o "actitud". Este modo requiere un acelerómetro para trabajar y no permitirá realizar volteretas y rollos (ya que el joystick no hacer rotaciones de 360 grados).
Para calcular el ángulo actual del quadcopter, la velocidad angular se lee utilizando el sensor giroscópico. Velocidad angular multiplicada por tiempo es igual a la cantidad de rotación durante ese tiempo. Hay un error en este proceso debido a la deriva y ruido en el sensor giroscópico. Para corregir este error, el acelerómetro se utiliza para medir la gravedad, que se mezcla en el cálculo. Para más detalles sobre esto, consulte:
- El filtro de equilibrio
- El filtro de Kalman
- Dirección matriz de coseno, relacionadas con http://en.wikipedia.org/wiki/Rotation_representation_%28mathematics%29
- AHRS, actitud y hacia el sistema de referencia
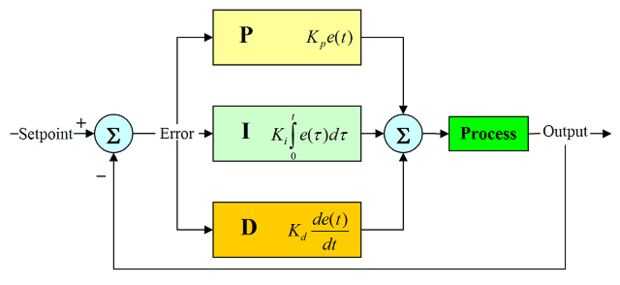
El controlador de vuelo utiliza esta información junto con un controlador PID para el control de los motores. PID significa proporcional, Integral, derivado". Vea estos enlaces:
- Controlador PID
- http://www.Engin.umich.edu/Group/CTM/PID/PID.html
- http://electronicdesign.com/article/Analog-and-Mixed-Signal/what-s-All-This-p-i-d-Stuff-Anyhow-6131.aspx
Para entender el término de "P", imagina que intentas aparcar un coche. Si usted está muy lejos del lugar de estacionamiento, que conduce rápidamente hacia el lugar. Medida que se acerca, usted debe frenar. Si conduces sobre la línea, usted necesita invertir (y por lo tanto su velocidad es negativa). Velocidad = distancia al punto * "P" en este caso.
Para entender que el "yo" del término, imaginar intenta aparcar el coche pero su coche es atado a una cuerda que no le deja llegar al lugar. Seguir intentando más duro y más duro hasta que la cuerda se encaja a presión. RPM del motor = término * integral de distancia a punto durante este período de tiempo.
Para entender el término "D", decir que movido 10 metros hacia su lugar, ya que usted sabe que avances, usted debe desacelerar un poco. Velocidad = diferencia entre la posición * término D.
Ahora imagínate en lugar de un lugar de estacionamiento y coche, usar este controlador PID para el quadcopter desde un ángulo a otro ángulo ajustando la diferencia de velocidad de giro del rotor. Ajuste los valores de los términos PID, podemos obtener el controlador de vuelo para hacer ajustes grandes y pequeños por lo tanto, mantener el quadcopter estable en vuelo.





![Control remoto de 2 canales sin IC [bueno para helicópteros!]](https://foto.askix.com/thumb/170x110/2/bf/2bf78721622eb49c1924bf372dc2a9ad.jpg "Control remoto de 2 canales sin IC [bueno para helicópteros!]")



 helicóptero del vuelo.")

")
")
")