Paso 28: Afinación y calibración



Esto debería ser la primera vez cuando tienes sus motores funcionando. Asegúrese de que usted siempre tiene un buen asimiento sólido en el marco que usted no ser dañado por las hélices de giro. También llevar protección para los ojos! Tuning se realiza mejor con dos personas, una persona que sostenga el transmisor de radio RC y la otra persona para sostener el helicóptero.
En primer lugar, leer esto: Lista de comprobación previa al vuelo
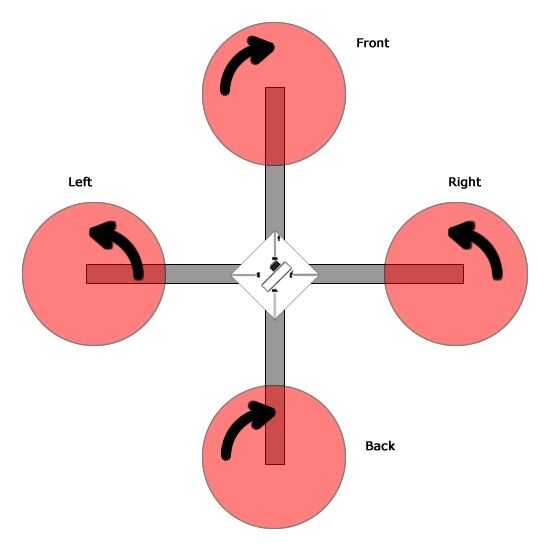
Girar en el helicóptero con los propulsores instalados. Ejecute el configurador para calibrar todos los CES (siga las instrucciones provistas del oficiales). Asegúrese de que de la vuelta según el esquema de dirección de giro de rotor. Si un motor necesita ser revertido, entonces recordar lo que dije sobre intercambiando los cables entre el ESC y el motor.
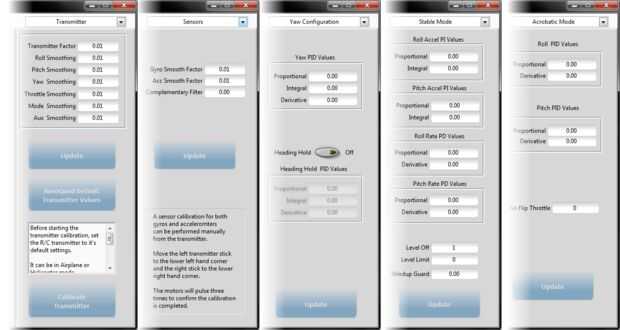
Existen varios parámetros que pueden sintonizar.
El factor de transmisión es ajustar la sensibilidad de su transmisor de radio RC. Este valor depende de sus habilidades de pilotaje personal y preferencia. Los factores de suavizado son las constantes de bajo paso-filtrado de que señales PWM RC, dejarlos en los valores predeterminados a menos que su emisora es muy ruidosa.
Realice una prueba de cordura mediante el uso de valores predeterminados. Levantando el acelerador debe mover todos los 4 motores más rápido. Tratando de desvío hará dos motores que girar en la misma dirección que gira más rápido que los otros dos. Tratando de la echada o del rodillo hará oposición motores hacer girar a diferentes velocidades. Usted debe ser capaz de sentir las fuerzas con la mano que sujeta el helicóptero. También use su mano para introducir las fuerzas, y el helicóptero debe responder aplicando fuerzas contrarrestar adecuadamente. Si algo no tiene sentido, un valor es probablemente invertida/negativo en el software, utilice el configurador para identificarlo y corregirlo en el sketch de Arduino.
También puede ajustar las constantes del PID para adaptarse a su estructura. Comenzar con los valores por defecto. El término P es ajustado primero, trate de girar el helicóptero a mano mientras está volando, aumentar el valor de P hasta que el helicóptero resiste muy bien la mano, y bajarla si el helicóptero oscila. Hacer esto para todos los tres ejes.
Documentación de AeroQuad no sugieren ajustar término de modo acrobático. También se dice "un valor D negativo se utiliza para ayudar el cambio AeroQuad más rápido a una posición de nivel después de vuelo hacia adelante. Es posible dejar D = 0 y todavía ver el vuelo de la actitud. Utilizando un valor de D negativo sólo es necesario basado en la preferencia del usuario."
Mi versión resumida sobre PID tuning es realmente corto, para más detalles, consulte:
También ver la oficial AeroQuad configurador documentación para obtener más información sobre tuning cosas.





![Control remoto de 2 canales sin IC [bueno para helicópteros!]](https://foto.askix.com/thumb/170x110/2/bf/2bf78721622eb49c1924bf372dc2a9ad.jpg "Control remoto de 2 canales sin IC [bueno para helicópteros!]")



 helicóptero del vuelo.")

")
")
")