Paso 4: Comprensión de motores sin escobillas

- http://en.wikipedia.org/wiki/Brushless_DC_electric_motor
- http://Electronics.howstuffworks.com/brushless-motor.htm
Para invertir el sentido de giro de motor, no inversa la corriente de entrada para la CES.
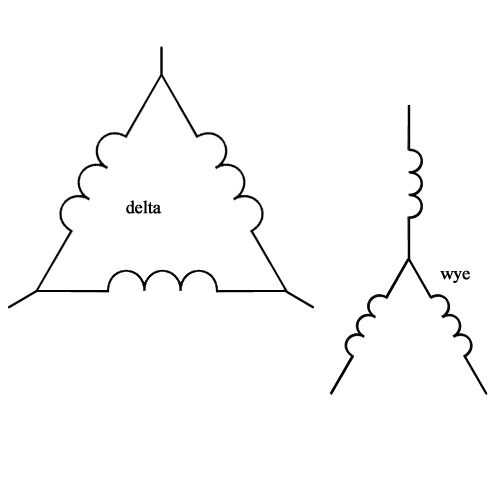
Te cuenta que hay tres cables que va entre el motor y el ESC. Estos motores son motores trifásicos, significa que hay tres bobinas dentro. Las bobinas se energizan en secuencia para hacer que los motores de la vuelta. Así que es trabajo de la ESC energizar las bobinas en la secuencia, pero necesita cada energización el tiempo correctamente para que el motor puede realmente acelerar a la velocidad correcta. El CES tiene un microcontrolador dentro de eso vueltas o apagar las bobinas usando FETs y también determina la sincronización mediante la medición de la retroalimentación en las bobinas causada por el movimiento de los imanes.
Ahora usted debe entender invertir el sentido de giro del motor, usted puede cambiar cualquiera de las dos de los tres cables entre el motor y el ESC. Para visualizar esto, si la secuencia original era:
123123123123123
y cambiar 2 y 3, obtenemos:
132132132132132
y así se invierte la dirección de giro.
Además, los CES contiene un regulador de voltaje de 5V (probablemente un 7805 baratos) y una función de corte de batería baja. Nuestro controlador de vuelo utilice esta fuente de alimentación de 5V.
Los medios de función de corte cuando se drena la batería de polímero de litio, dejará de girar el motor para proteger a la batería. Esto es porque puede ocurrir un daño permanente a la batería si se escurre por debajo de un umbral. Pero cuando el motor deje de girar, el regulador de tensión todavía proporciona 5V. Esto es para que los servos de un avión todavía pueden funcionar utilizando esa fuente de 5V, y el aeroplano RC aún puede deslizarse a un aterrizaje seguro sin un motor.
Sin embargo, en nuestra situación de helicóptero, si un motor muere, el helicóptero hará girar fuera de control en el aire. Se convertirá en un peligro para la seguridad a todo el mundo alrededor de él. Así, fijamos la tensión de corte a "baja" por lo que aprovechamos al máximo el tiempo de vuelo. Contamos con nuestro monitor de batería en su lugar, por lo que evitamos exceso drenar la batería.
Nota: algunos CES pueden ser hackeados! ¿Te gusta la piratería, derecho? Lee esto: http://www.rcgroups.com/forums/showthread.php?t=766589 . La ventaja de I2C controlado ESCs es tasas de actualización más altas, más precisión y sólo lleva dos hilos para controlar motores de hasta 127. Quedo con algunos pequeños cambios en las opciones de compilación de nuestro software de vuelo para usarlos desde el código ya está disponible. Sin embargo, para el resto de este instructable, sigo utilizando PWM controlado por CES.





![Control remoto de 2 canales sin IC [bueno para helicópteros!]](https://foto.askix.com/thumb/170x110/2/bf/2bf78721622eb49c1924bf372dc2a9ad.jpg "Control remoto de 2 canales sin IC [bueno para helicópteros!]")



 helicóptero del vuelo.")

")
")
")