Paso 8: Resumen de controlador de vuelo
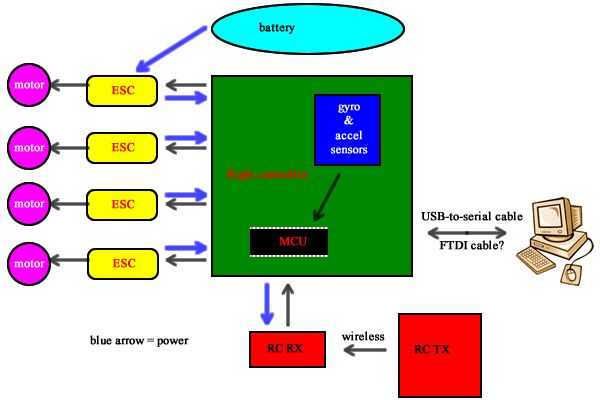
Los sensores que se utilizan son el BMA180 acelerómetro de 3 ejesy el giroscopio de 3 ejes ITG-3200. Ambos están disponibles en un formato de breakout board de SparkFun así que no tienes que soldar los chips. Tenga en cuenta que ambos son sensores digitales, esto significa que ambos tienen internos convertidores de analógico a digital (ADC) que se desempeñan mejor que los ADCs integradora de microcontroladores más. Ambos de estos sensores utilizan el bus I2C, que significa solo dos cables se requieren para ambos sensores. El bus I2C puede funcionar a 400 KHz.
El receptor de radio RC tendrá 6 o más pines de señal de canal, cada señal se conectará a uno de los pines en el microcontrolador. Estas señales serán las señales de modulación de pulso, por lo que el microcontrolador mida el ancho de cada pulso para tomar la entrada del usuario.
Los CES cada esperan una señal modulada de ancho de pulso. Uno de los pines en el microcontrolador se conectará a una ESC. El microcontrolador será salida de pulsos para cada ESC para controlar su velocidad individual.
Aunque un Arduino ordinario tendría suficiente rendimiento como el microcontrolador, decidí usar un ATmega644P en mi diseño para tener más memoria y más pins para experimentar con. Mi diseño todavía utiliza 16 MHz, utiliza el bootloader de Arduino, y es compatible con el IDE de Arduino.
El ATmega funciona a 5V ya que se requiere en 16 MHz 5V, esta fuente de alimentación de 5V se proporcionará por el CES ya que todos tienen un regulador de voltaje 5V incorporado.
Los sensores funcionan con 3,3 v y por lo tanto nuestro circuito contiene un 3.3V regulador de voltaje de baja deserción que convierte los 5V a 3.3V para que con seguridad podemos interactuar con los sensores.





![Control remoto de 2 canales sin IC [bueno para helicópteros!]](https://foto.askix.com/thumb/170x110/2/bf/2bf78721622eb49c1924bf372dc2a9ad.jpg "Control remoto de 2 canales sin IC [bueno para helicópteros!]")



 helicóptero del vuelo.")

")
")
")