Paso 5: Las conexiones eléctricas

r. usted puede encontrar la configuración de control de motor paso a paso en la página de ayuda de Arduino
por ejemplo http://arduino.cc/en/Reference/Stepper
http://www.tigoe.net/Pcomp/Code/Circuits/Motors/stepper-Motors/
pero Dónde está la diversión en eso.
Empecé a comprender los fundamentos del motor de pasos: por ejemplo, http://library.solarbotics.net/pdflib/pdf/motorbas.pdf y entender cómo enviar la forma de onda pulsada para el motor paso a paso de programación de Arduino.
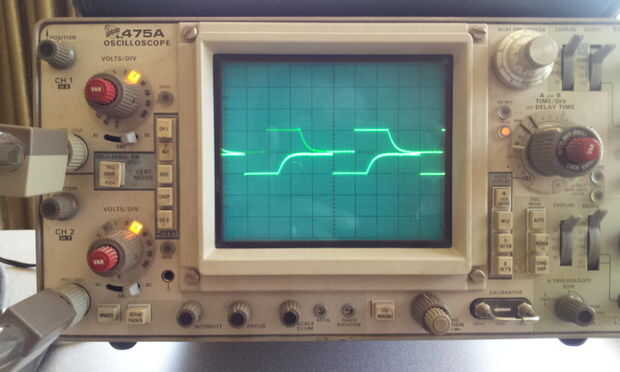
b. a continuación, mientras que el escáner era funcional, leer las formas de onda de las entradas de modulación de ancho de pulso (PWM) para el motor paso a paso con un osciloscopio antiguo. Y se ve como se ve en la imagen siguiente. Esto es para el 1 º dos armaduras con un desplazamiento de fase de 90 grados. Los restantes terminales o las armaduras reciben una forma de onda exactamente invertida de (180 grados de fase cambiada de puesto). El voltaje es de 12V.
c. la idea de usar una placa Arduino es imitar esta forma de onda para controlar el motor paso a paso. Ahora, la placa de Arduino puertos de salida que generan el PWM no pueden suministrar los 12V que requiere el Motor paso a paso, así que tenemos que usar un Array de Darlington como uno en TI (ver: http://www.ti.com/lit/ds/symlink/uln2003a.pdf) que toma la entrada de la placa Arduino y suministra el PWM 12V al motor paso a paso.
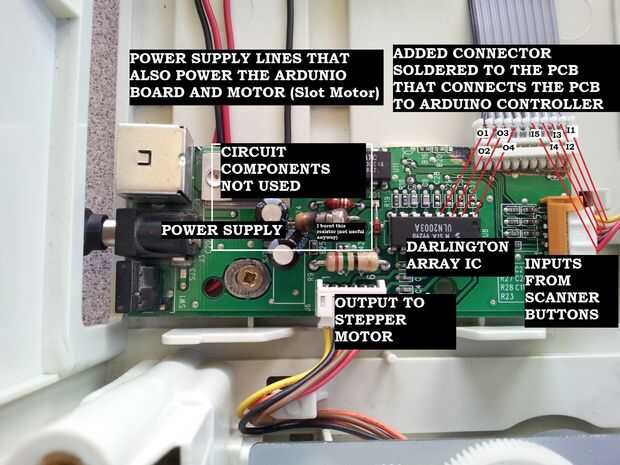
Por suerte, el UN2003A de IC Darlington Array existe en el tablero de regulador de escáneres (PCB), junto con la alimentación y las entradas de los botones del escáner. Todo lo que tenía que hacer es cortar (mediante la herramienta Dremel) una pequeña sección de este regulador del tablero y reutilizar para tomar las entradas desde mi controlador Arduino:
Los diversos componentes importantes de la pequeña sección de la Junta se explican en la siguiente imagen: el show de líneas rojas debajo de las conexiones la Junta a un conector encontré en una tienda de electrónica excedentes de 75 centavos de dólar. El conector provee entradas y salidas de la placa Arduino. Yo también suministrar la energía a Arduino de esta junta.
Tenga en cuenta los números de las líneas rojas que indican la numeración de los hilos. I1-I5 indican los cables de entrada, y O1-O4 indican la salida de los cables que van al motor paso a paso. Voy a utilizar la misma numeración para marcar las conexiones a la placa Arduino.
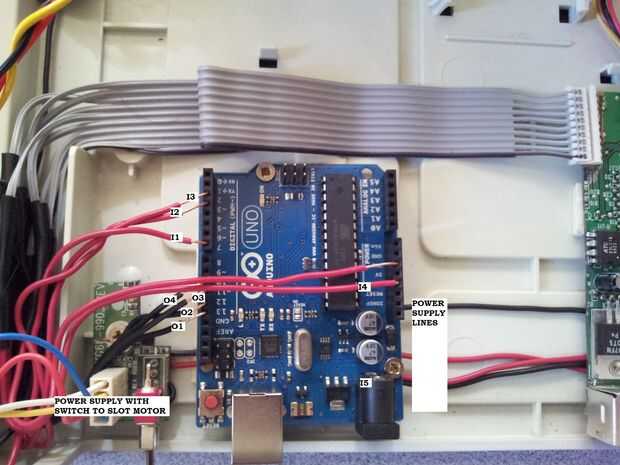
El siguiente paso es conectar la entrada y salida de pines del microcontrolador Arduino a las entradas de botones del escáner y el Motor paso a paso. Las conexiones de mirar como se muestra en la figura siguiente que muestra la Junta Ardunio.
Las conexiones eléctricas del motor de ranura deben ser bastante sencillas y si ha venido esto ahora te dejaré saber cómo hacerlo. Recomiendo que se conecte a una fuente de alimentación separada para que no se metan con los controles de lógica.
![Viento generador viejo escáner [actualizado]](https://foto.askix.com/thumb/170x110/c/d7/cd7063b79dac49f85ad013ddbb578ce5.jpg "Viento generador viejo escáner [actualizado]")












