Paso 5: Arduino cableado + programación



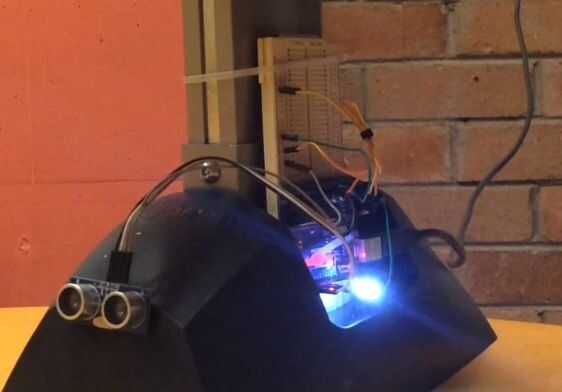
Esencialmente un sensor sonar conectado y un servo con luz LED indicador. Utilice las definiciones en el código para saber donde poner los cables.
El código:
#include < Servo.h >
Servo myservo; crear objeto servo para controlar un servo
int pos = 0;
trigPin int = 4; Trig - puente verde
echoPin int = 2; Puente eco - amarillo
larga duración, cm, pulgadas;
void setup() {}
Comenzar a puerto serial
Serial.Begin (9600);
myservo.Attach(9);
Definir las entradas y salidas
pinMode (trigPin, salida);
pinMode (echoPin, entrada);
pinMode (13, salida);
}
{} void rotate()
va desde 0 grados a 180 grados
en pasos de 1 grado
myservo.Write(100);
Delay(2000);
myservo.Write(0);
Delay(2000);
}
void comprobar (int cm) {}
int temp;
Temp = 0;
Temp = cm;
Si (temp < 5) {}
Delay(1000);
digitalWrite (13, HIGH);
Rotate();
} else {}
digitalWrite (13, bajo);
myservo.Write(95);
}
}
void loop()
{
El sensor se activa mediante un pulso alto de microsegundos 10 o más.
Dar un breve impulso de baja previamente para asegurar un pulso limpio alto:
digitalWrite (trigPin, LOW);
delayMicroseconds(5);
digitalWrite (trigPin, HIGH);
delayMicroseconds(10);
digitalWrite (trigPin, LOW);
Leer la señal del sensor: un alto pulso que
duración es el tiempo (en microsegundos) desde el envío
del ping a la recepción de su eco de un objeto.
pinMode (echoPin, entrada);
duración = pulseIn (echoPin, HIGH);
convertir el tiempo en una distancia
cm = (duración/2) / 29,1;
pulgadas = (duración/2) / 74;
Serial.Print(inches);
Serial.Print ("in");
Serial.Print(cm);
Serial.Print("cm");
Serial.println();
Delay(2000);
myservo.Write(95);
Check(cm);
Delay(100);
}



")









