Paso 4: Configuración del Robot a pie
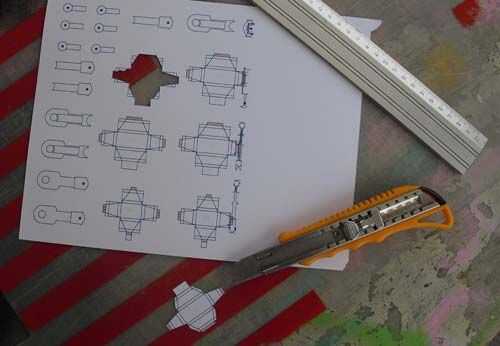




1. hasta el cuerpo. Para las piernas y los pies tenemos que imprimir el siguiente archivo PDF en papel de 250 gr/m2. Cortar las tres patas y dejar unas pestañas para conectar las esquinas. Luego corte una vez las tres capas de la pierna y la articulación.
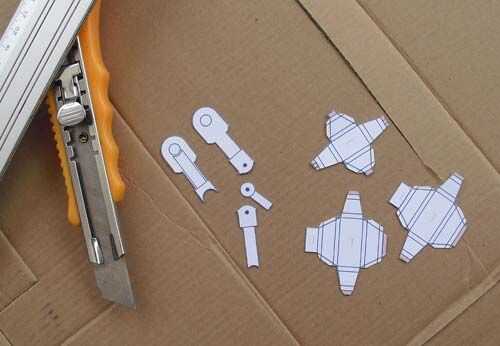
2. tres pies doblados y pegados. Las tres partes de la pierna y la articulación para transferir a un cartón grueso de 2mm. Recicla tus cajas de zapatos, si se puede...
3. las piezas para las piernas cortan ya. El uno con el arco va en el centro. Usé un perforador de oficina para perforar los orificios (yo lo hice después de cortar las piezas, ser inteligente y hacer la perforación primero y luego dibuje las formas en la cartulina).
4. aquí pegué los pedazos de la pierna del paciente junto, cerrando la parte delantera del espacio y para la articulación del futuro. Los pies tienen rectángulos pequeños cortadas en la parte superior para permitir que las juntas a pegar. Los imanes le dará los pies peso para anclar el huevo pesado al suelo).
5. otra palabra para los imanes: las paredes tienen un ángulo así que asegúrese de que los imanes pegados no bloquean el cierre de los pies. Puse un segundo en cada pie (epoxy) y todavía tenía espacio para la articulación a medio. Cuidado con que los imanes tienen la misma orientación hacia la parte inferior.
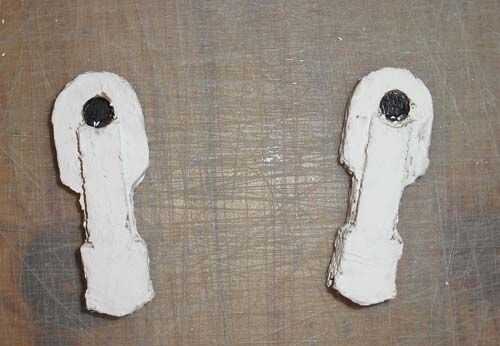
Esta imagen: piernas con relleno.
6. los pies que medio cerrados, los empalmes pegados en. Los imanes 2 no ir tan suavemente, porque ellos fueron tirados por los primeros. Por lo que se pegan demasiado hacia fuera y cerrar los pies hacían protruyan. Si no desea que su robot para subir al lado de su vehículo, use metal simple como peso.
7. los pies con relleno. Tengo interesado que los imanes podrían estar demasiado fuertes para ese papel delgado, antes de la llenadora pegué otro rectángulo de cartón a la suela. Estabilización y reducción de la extracción de una sola vez.

")








")


