Paso 11: Añadir los pines de Servo

Sobre el diagrama:
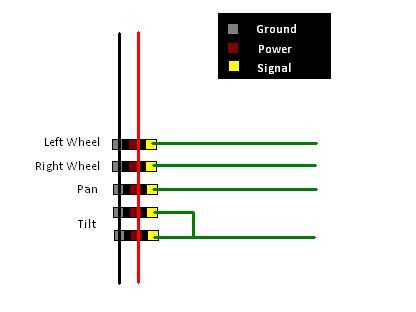
En el cuadro 1, se puede ver que planeo para servos "Rueda de la izquierda", "Rueda de la derecha", "Pan" y "Tilt". Los servos de rueda derecha e izquierda de energía obviamente las ruedas de Reginald. Los servos panorámica y basculantes son para panorámica e inclinación de la cámara y las torretas de Reginald. Hay dos servos independientes para la inclinación y un servo a la cámara y las torretas de la cacerola.
Los cables de señal de los soportes de inclinación son atados juntos para que estén en sincronía uno con el otro. Mi objetivo era que la cámara y las torres se mueven juntos. Así, dondequiera que la cámara está apuntando, las torretas se disparará.
Pruebas:
Cuando todo es cableado conectado, prueba enchufando en el escudo de Ethernet en el Arduino. Si mantiene los mismos pines que tengo, simplemente puede cargar el código en la placa. Configurar usted mismo como lo hizo cuando se activa el LED. Usar la GUI para tratar de controlar a algunos de los servos. ¿Cuando presionas arriba, mover los servos de rueda?




 de voz")







