Paso 2: Vista Macro del proyecto
La visión Macro de Reginald
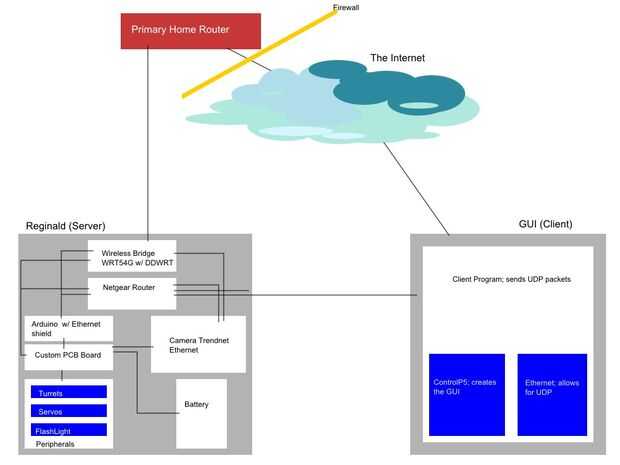
La imagen principal es de un gran punto de vista del funcionamiento de Reginald.
El cuadro gris en la esquina inferior izquierda es el robot físico, situado en el país.
El cuadro gris en la esquina inferior derecha es el programa cliente. Es una GUI que recibe órdenes del usuario y transmite los comandos a Reginald. La GUI se ejecuta en un ordenador.
El trabajo en red
Observe que hay dos caminos separados para conectar a Reginald. Esto es porque es útil tener dos maneras diferentes de hacer la conexión depende de las circunstancias.
- Hay una conexión directa desde la GUI (cliente) a Reginald (servidor). Esto es bajo la circunstancia que Reginald está muy cerca del usuario. Si el usuario está utilizando la interfaz gráfica (cliente) en un ordenador portátil, entonces Reginald puede crear su propio "punto de acceso inalámbrico" si se quiere (sin embargo no es un punto de acceso real porque el usuario no puede conectarse a internet). En este punto el usuario puede conectarse directamente a Reginald y controlarlo.
- El otro método de conexión es mucho más complejo, y donde es fundamental el conocimiento de las redes. Por simplicidad, permite asumir el usuario en una computadora en la escuela mientras que Reginald es en casa. Reginald en este momento está utilizando el puente inalámbrico se muestra y se conecta como un dispositivo inalámbrico de la red doméstica. Reginald tiene un puerto y dirección IP específica dentro de la red. El Router primario de inicio está configurado con un puerto adelante excepción que un UDP en el puerto correspondiente de Reginald va a Reginald, dijo. El usuario puede ejecutar el programa de GUI (cliente) en la computadora en la escuela. En este punto, los tipos de usuario en la dirección IP externa del Router primario Inicio y el puerto de Reginald se encuentra en el programa. El usuario envía un comando al interactuar con la interfaz. El comando se envía a través de internet y el Router primario de inicio. El Router primario Inicio ve al puerto especificado y está configurado correctamente, envía el comando inalámbrico el puente inalámbrico a Reginald. El puente inalámbrico entrega el comando a la Arduino y Reginald responde adecuadamente.
Cabe mencionar que el método de conexión de este último es opcional. El lector puede decidir ir con un enfoque más simple y sólo utilizar la conexión directa. La desventaja obvia de esto es que el usuario no podrá controlar Reginald desde cualquier lugar, solamente cuando el hotspot de Reginald esté dentro de gama del usuario el usuario podrá controlar Reginald.
¿No los Routers complicar el proyecto y hacer voluminosos?
Me doy cuenta de que los enrutadores es utilizar en Reginald un abultado en el mejor; como alternativa, podría han utilizado una cámara de vigilancia inalámbrica conectada directamente al Router principal Inicio y utiliza un escudo de wifi para el Arduino conectarse también al Router principal Inicio. Esto habría cortado el "hombre medio" (enrutadores) del proyecto hacia fuera y yo pude Reginald significativamente menor; Además, utilizar los routers en mi diseño es más difícil de implementar.
¿Por qué usaron Routers?
La razón detrás de los routers es que uno de mis objetivos es simplicidad en experiencia de usuario. Si el usuario quiere control de Reginald, en casa, de la escuela y decide tomar Reginald a su casa de amigos para mostrar: el usuario simplemente desconecta la cámara, el poder y el Arduino desde el puente inalámbrico y conecta al Netgear Router. El usuario se conecta al router Netgear y eso es todo! Si tuviera que aplicar un protector de cámara y wifi de red inalámbrica en mi diseño, el usuario realice lo siguiente para lograr el mismo escenario: traer Reginald a casa de un amigo; obtener toda la información de red de la red principal de amigo; configurar la cámara a la red; acceso código de Reginald; cambiar la configuración de la web y subir nuevos sketch a Junta; continuación, conecte.
Tener en cuenta cuando me refiero a los Routers:
Este proyecto utiliza tres Routers. La primera de ellas voy a referirme a que el router "Netgear" ubicado en Reginald. No hablo de esto mucho, sólo se utiliza para la conexión directa a Reginald si lo trajo fuera de la red local. Una configuración simple.
Los routers de segundo y terceros hablan entre sí. Ellos son lo que la comunicación a cualquier parte. Te remito a un Router como un "puente sin hilos" que se encuentra en Reginald. Yo lo llamo un puente inalámbrico porque es un cliente al Router tercera: el "Home Router primario", también puedo llamar el tercer Router un "punto de acceso" (AP). El Router de casa primaria es el Router conectado al módem en casa que trae una conexión a internet wifi en su casa. El puente inalámbrico es un cliente que sirve el internet desde el Router principal Inicio para dispositivos conectarse a sí mismo (en este caso: Reginald).
Más adelante te estar hablando acerca de cómo funciona el puente inalámbrico.
Notas interesantes:
Observe también que la cámara no interactúa con el Arduino en todos. La cámara es accionada con el tablero del PWB y conectada al puente inalámbrico o Netgear Router. El usuario puede acceder a la cámara desde cualquier lugar en ese momento.
También es importante reconocer que lo único que la batería está conectada a la placa PCB. Esto es porque la placa distribuye la energía a todo lo demás. No todos los componentes requieren cantidades iguales de energía. Los Routers ambas requieren 12 voltios; el Arduino y periféricos requieren 7 voltios; y la cámara necesita 5 voltios. El tablero del PWB necesita dar cabida a todas las partes.




 de voz")







