Paso 2: Motor de pasos Unipolar para la impulsión de la tabla

Tuve un PM35L - D48 motor de paso a paso que fue quitado de una vieja impresora HP. El motor básico tiene 48 pasos/revolución. Salió que si este motor podría ser micro-caminó por un factor de 4 entonces esto daría 192 pasos/rev. Esto debería funcionar 3,75 min por paso de un gráfico circular de 12 horas. Consideré esto aceptable para comenzar con.
El motor tendría que ser reemplazado por este paso a paso, operado en un micro paso por modo 4.
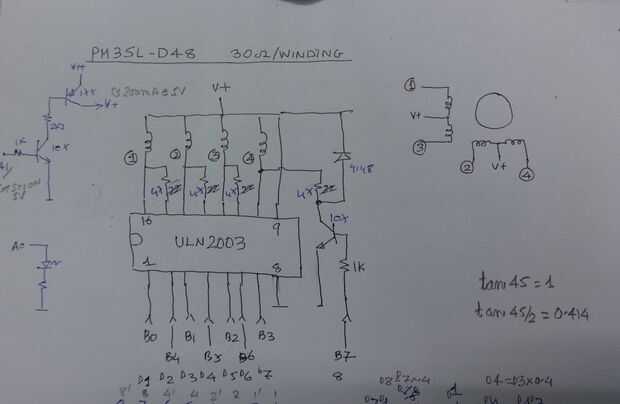
Para comprobar que esto me aparejó un circuito basado en el ULN2003 IC controlador con entradas conectadas a las salidas de un microcontrolador PIC16F628A.
El paso a paso unipolar tiene dos bobinados de split con el grifo de centro conectado entre sí. He trabajado la secuencia de giro en los modos single-step, paso/2 y paso/4. Básicamente el modo de paso único usa una bobina a la vez. El modo de paso/2 utiliza una cuerda seguida de dos bobinas en la secuencia. Para obtener el modo de paso/4 es necesario también crear una corriente de la bobina X 0.41 modo para cada devanado. La secuencia correspondiente de la unidad también se encuentra en la figura.
El ULN2003 tiene 7 controladores internos pero el esquema de paso/4 exige que los 8 conductores. Un conductor adicional es proporcionado por un transistor NPN.
Las cifras muestran:
- El motor paso a paso con indicador de posición temporal
- Circuito de controlador ULN2003 y esquemática de la bobina
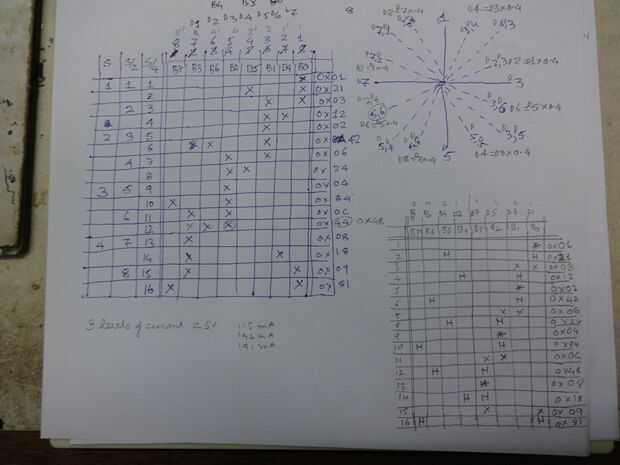
- Paso de la secuencia y binario de salida necesaria para los diferentes modos de caminar
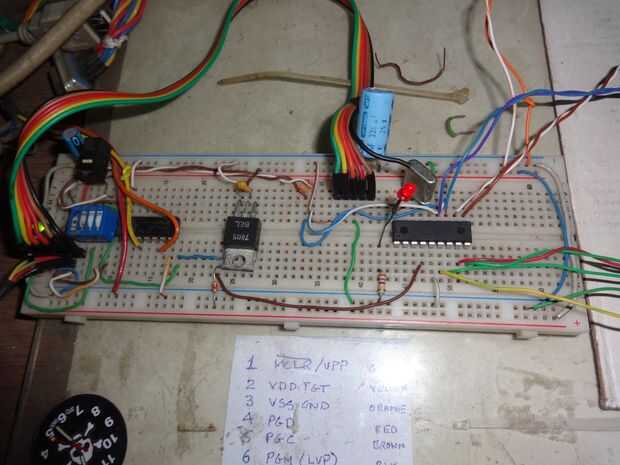
- Protoboard para el microcontrolador PIC16F628A
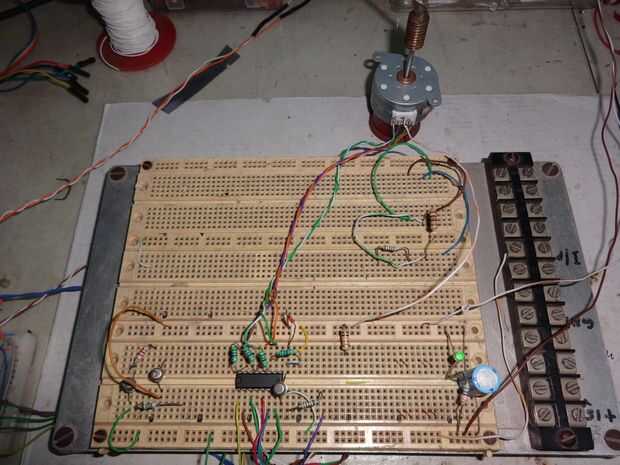
- Tablero del controlador ULN2003
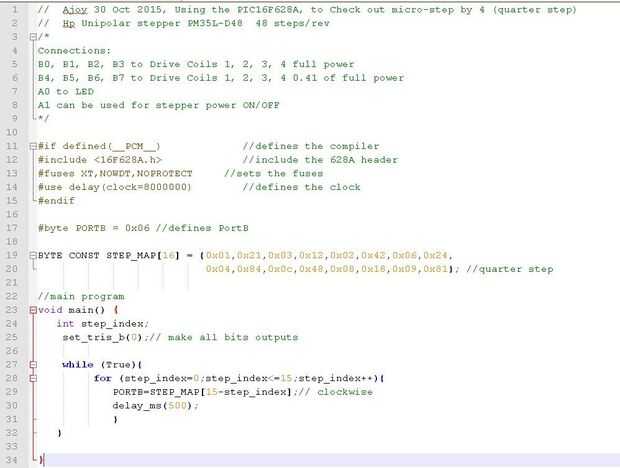
- C-código para el PIC16F628A comprobar hacia fuera de modo de paso/4
Este breve vídeo muestra la acción de micro-paso a paso:








 el disco duro y pruebalo!")




