Paso 2: Practico unidad (programación del Atmega 2560)
Para enviar, recibir y analizar los datos que tenemos una máquina de estado que primero envía el PID correspondiente y luego guardar la respuesta recibida en el puerto de Rx en una variable y luego de este extracto o decodificar los valores reales que buscamos whit cada PID. (Usted puede ver esto en el código no va a entrar en detalles muy ya que es un código largo de explicar)
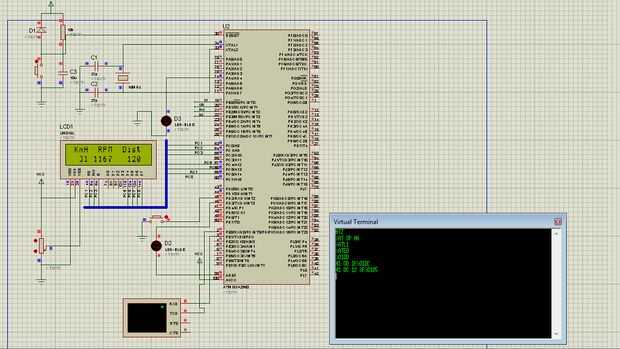
Una vez tenemos los valores de los datos deseados en mi caso velocidad RPM y odometría podemos mostrar esto en un LCD 16 x 2 usando una biblioteca lcd estándar.
La odometría se tomó no directamente, ya que no pude encontrar un PID para obtener dicho valor, lo hizo mediante la medición de la velocidad cada segundo usando una interrupción y de la velocidad puedo medir la distancia recorrida en un segundo y añadir a la variable dist que contienen la distancia total recorrida desde el poder sobre.
Esto ahora tenemos el sistema de trabajo como puede verse en la foto de arriba. (encontrar el código fuente y simulación al final del post)












")
