Paso 1: trabajo
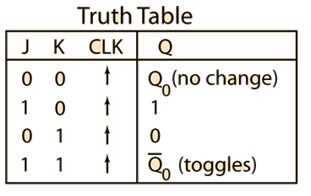
Los sensores inferiores actúa como la entrada de 'J' y el sensor superior actúa como la entrada de 'K' en el flip-flop de J-K...
el funcionamiento de los sensores de ambos es opuesto, es decir, el sensor superior da salida 1 cuando se detecta el agua, y el sensor inferior da salida 0 cuando se detecta el agua...
Con este sensor un poco, podemos predecir la salida de JK flip-flop como-
cuando hay agua en ambos sensores, entrada = 1 0, salida = 0 = motor apagado
Cuando el agua está cayendo después de llenar, de entrada = 0 0, salida = 0 = motor apagado
Cuando se trata de agua debajo del sensor inferior, entrada = 1 0, salida = 1 = motor en
Cuando el agua comienza desde el sensor inferior, entrado = 0 0, salida = 1 = motor en
cuando hay agua en ambos sensores, entrada = 1 0, salida = 0 = motor apagado













