Paso 5: Dibujar el cableado esquemático, virtual
Obviamente, este proyecto requiere tableros del circuito impreso personalizado, la mejor herramienta para diseñar es Altium Designer, al menos para mí. Primero tenemos que dibujar un esquema, entonces utilizamos para colocar nuestros componentes de la placa.
Este reloj de disco duro consiste en realmente dos subproyectos: una tabla de base de y un huso. El tablero de base es responsable de girar el motor a la velocidad deseada, debe tener un LED también, por lo que la junta superior se puede hacer referencia a un punto de referencia estable.
1. esquema de junta del eje
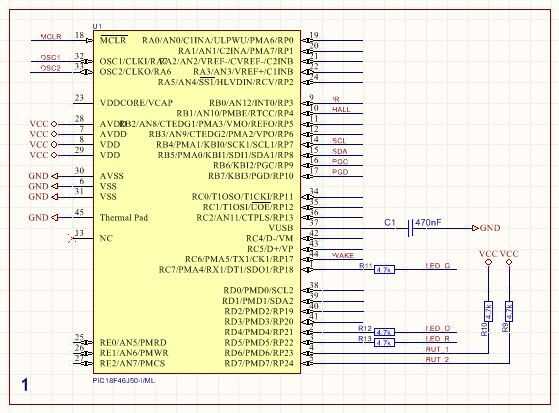
Un par de días que tuve la suerte de tener en mis manos una basura electrónica más grande y una pistola de aire caliente. Yo tengo muy pocos procesadores PIC, MOS-FETs, LEDs, relojes en tiempo real, osciladores de cristal y varios otros componentes valiosos. Uno de los procesadores que rescató fue un PIC18F46J50, elegí este es mi unidad principal de procesamiento. Altium Designer tiene un amplio conjunto de esquema y PCB bibliotecas de componentes electrónicos, llevó a las librerías de Microchip y había añadido el procesador desde allí. De esta manera usted puede hacer seguro que no fallas en la huella de PCB - estas bibliotecas son revisadas a fondo.
Después de agregar el procesador para el esquema, es un buen comienzo para conectar todos los pines de alimentación, agregue los nombres de red, agregar programación de interfaz de encabezado. Después de eso, analizar un poco lo que anotó en el paso anterior.
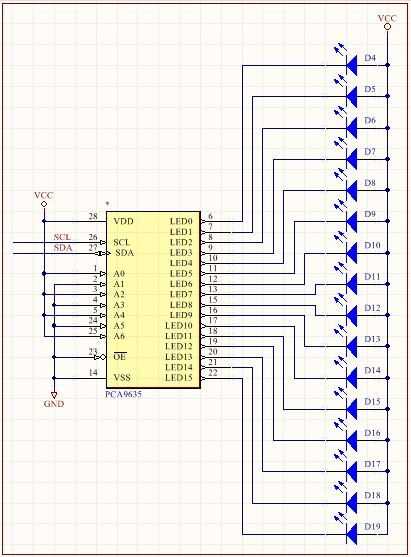
1. 1. Módulo del controlador de LED
Necesitamos un controlador de LED de 16 canales con pines de control como pocos como sea posible. Fui por mis cajones y encontró un controlador de controlador de LED PCA9635 (salvado), que puede ser controlado a través del I²C bus. Perfecto! Mi procesador tiene dos módulos de I²C, incluso puedo escoger que uno se uso - depende de la PCB que veremos más adelante. Dicho esto, soltar el PCA9635 en el esquema.
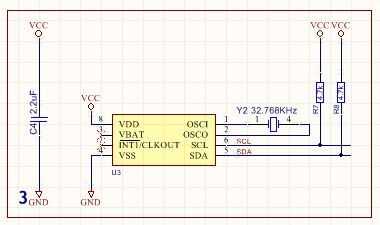
1. 2. Calendario y reloj en tiempo real
Para mantener el problema del tiempo los hombros de procesadores, elegí el PCF8523 (salvado) de NXP, debido a la simplicidad y a la cómoda interfaz I²C. Tengo que admitir que usé esta uno antes, el código fuente probablemente será el mismo. Caer en la PCF8523.
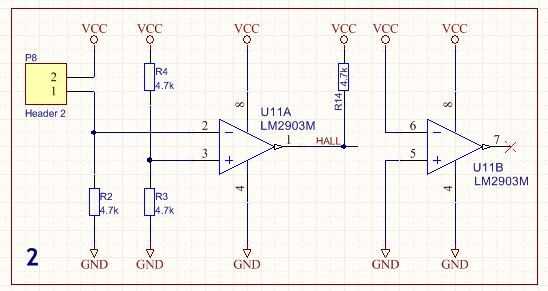
1. 3. Comparadores de
Tenemos que encontrar una manera de nuestro eje a un punto estable de referencia para saber cuando a parpadear los LEDs. Este punto de referencia importante para la activación de los patrones de luz, pero creo que es más importante porque tenemos la velocidad de rotación de esta entrada. Cambia la velocidad de rotación y tenemos que ajustar el LED de encendido y apagado horarios según él. Elegí un comparador LM2903 (salvado) para dar una interfaz a cualquier tipo de procedimiento que elegí después de detectar. Quería ir con sensores hall, pero ya he utilizado muchos imanes tan fuerte, pensé que quizá sería más seguro utilizando un sensor de luz. Deje caer el LM2903 en el esquema.
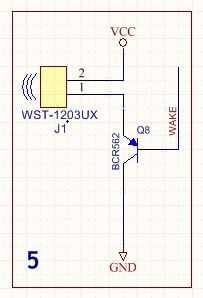
1. 4. Alarma
Se trata de un reloj, va a necesitar una alarma. Usé un simple timbre (salvado), con un transistor pre-parcial de BCR562. Quería utilizar el pin de interrupción PCF8523 para desencadenar este (incluso la polaridad de señal emparejada), pero esa zona de la PCB ya estaba increíblemente llena. Así que el pasador va a utilizar para despertar a alguien va eb uno de los procesadores. Poner en el zumbador y el transistor.
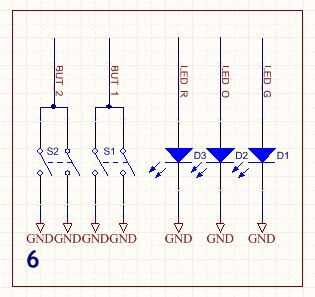
1. 5. Interruptores
Estas se colocaron en por precaución, hasta que el procesador estaba en funcionamiento. Utilizado para depurar el código, para probar la comunicación I²C y consultar horarios.
1. 6. LED
Otra vez, éstos también fueron utilizados para el control de efectos. Latidos cardíacos de tres LEDs por lo que puedo enviar señales y todo lo que quieras del código.
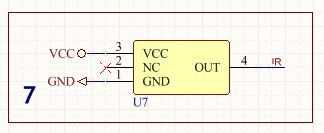
1. 7. IR - receptor
Este lo hará girar rápidamente así que es imposible utilizar los botones para ajustar el tiempo. Un detector de infrarrojos de Vishay (salvado) es más apropiado para el trabajo: se detectan señales provenientes de un mando a distancia IR y traducirlas a señales legibles para el procesador. Caer en.
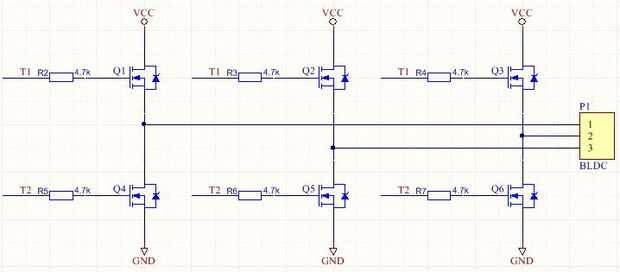
2. esquema zócalo
Como has visto hasta ahora, casi cada componente que utilicé fue uno que rescatado de la basura electrónica que he mencionado un poco antes. Voy a utilizar seis canal N MOS-FETs para hacer el movimiento del motor, un LED para la sincronización con el eje, y dos botones que utilizo para ajustar el eje de la velocidad. Sabiendo esto, necesito un procesador que tenga al menos 9 pines de I/O. Una opción simple es PIC16F84A (ahora obsoletos, y han tenido algunas de las edades).
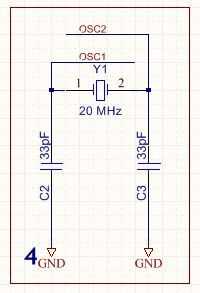
Hay mucho que decir aquí, lanzar en seis MOS-FETs, una LED, un oscilador, algunos botones, el procesador de las librerías de Microchip y conéctelos juntos. Utilice los restantes cinco pernos para retroalimentación con respecto a velocidad. He añadido un LED a cada una de estas salidas sobrantes.
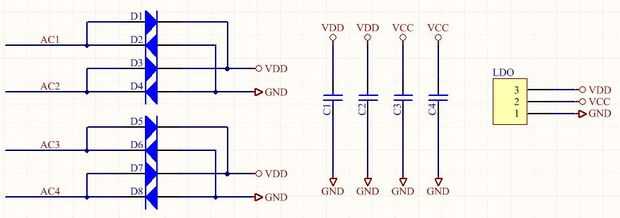
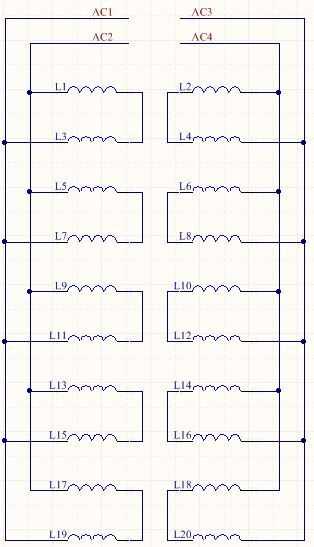
3. power board repair manual
Este esquema contiene dos puentes rectificador, un regulador LDO junto con su entrada y salida filtro casquillos y las bobinas caseras que vamos a utilizar como una especie de PICK-UPS. Un LED se pone en este foro así como a la señal si la cosa funciona o no.
4. resumir lo acabo de hacer
No menciono cada resistor solo pongo en, estos siete fueron los componentes más importantes y la única que vale la pena ser mencionado. Algunos de los componentes tenían símbolos, algunos no. Algunos de los componentes tenían huellas, algunos no. Creo que dibujo huellas y símbolos en Altium Designer de forma fácil a mencionar aquí. Sin embargo, si hay peticiones para poder mostrar cómo se hace tal cosa, hace un nuevo giro e incluyen también.
Dicho esto, los cables de halar, poner a enlaces, borrarán, copiar y pegar hasta sus esquemas parece mina, o está contento con la apariencia.



")





")



