Paso 7: Programa de la Junta

Dicho esto, dejo la soldadura de los componentes de la parte posterior para el siguiente paso.
MATERIALES / HERRAMIENTAS:
-Fina con punta de soldador
-Soldadura y la soldadura de flujo
-Hilo
-Arduino (sin astillas) o el tablero FTDI programación
Como antes, no agrego pernos breakout para conectar la interfaz FTDI. Por supuesto, usted podría también han dejado las patillas ICS conectadas desde el gestor de arranque para cargar el archivo .hex del bosquejo con tio AVR o un software de programación AVR similar de programación. Pero, me gusta usar FTDI porque puedo dejarlo conectado a mi arduino y más fácilmente modificar y subir un dibujo diferente.
Si está utilizando una placa arduino al programa, usted necesitará quitar el chip ATmega. Para hacer esto, con cuidado haga palanca en ambos extremos con un pequeño destornillador de cabeza plana. Levante el chip lentamente por ambos lados con el fin de no doblar ninguna de las patillas. Una vez que el chip está hacia fuera, coloque en una bolsa de prueba estática (si compró todas las piezas de este proyecto, abrir una de las bolsas de plata y poner allí) si no, va a trabajar una lata Altoids.
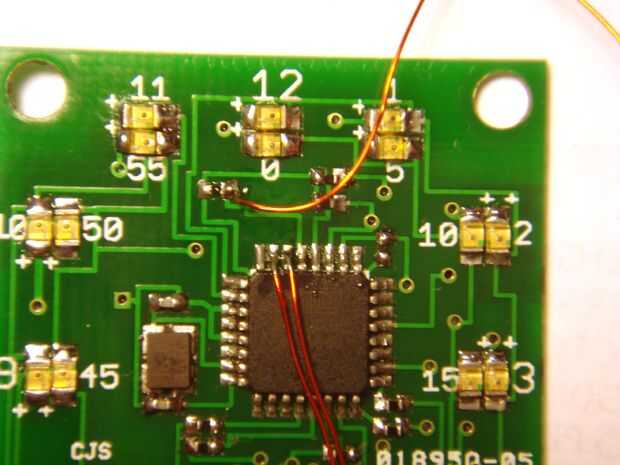
Si usted está utilizando un arduino o una junta FTDI, los pines que necesita soldar será el mismo. Hay 5 pernos:
-VCC
-Tierra
-TX
-RX
-Reset
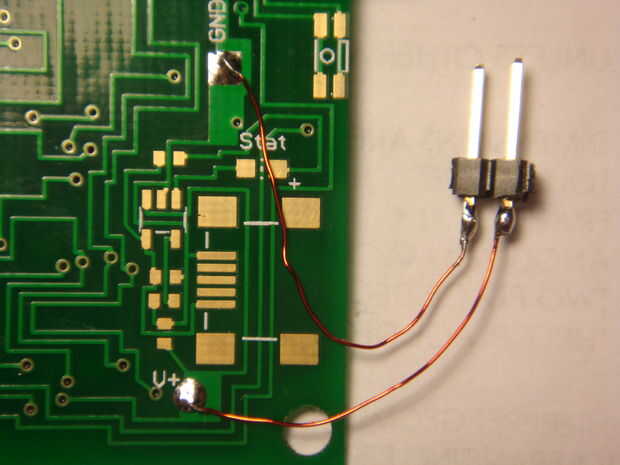
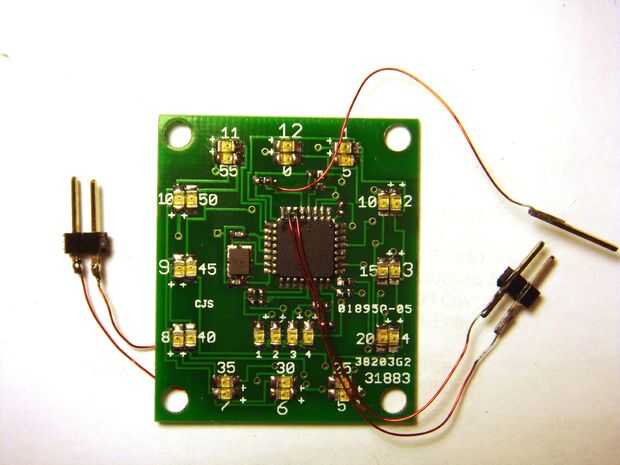
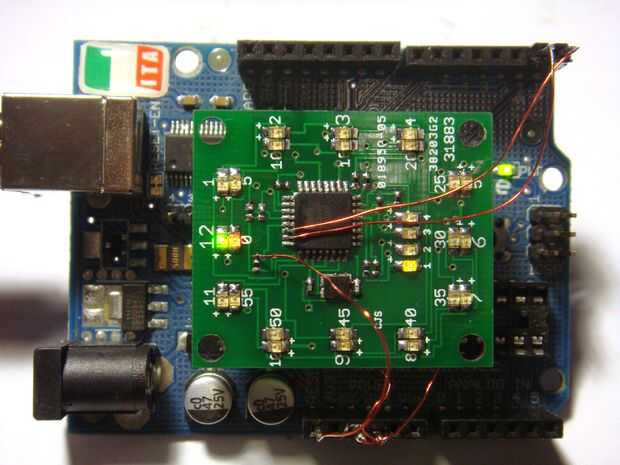
Utiliza alambre magneto para conectar a los pines necesarios en el tablero, luego soldar los otros extremos a unos pernos de jefe varón. Los pernos entonces pueden conectarse a tu arduino o tablero de FTDI.
Una vez que tengas todo conectado, tratarla como cualquier otra placa arduino compatible. Conectar tu arduino a tu ordenador mediante USB y abrir el IDE de arduino. Seleccione la placa como arduino nano w / atmega328, seleccione el puerto COM y está listo para programar.
PROGRAMACIÓN:
Primero usted necesitará descargar los archivos MakerbotWatch .ccp y .h de la parte inferior de la página. Abra su carpeta de la biblioteca arduino, crear una nueva carpeta y coloca estos archivos en él.
Modifiqué los archivos originales para acomodar la disposición de mi tablero por lo que si usted ya tiene el makerbot ver archivos, necesitará cambiar el nombre de estos archivos y cambiar los #includes en el bosquejo.
Descargar el sketch de arduino desde la parte inferior de esta página, abrir el IDE de arduino y subir al reloj. Una vez que termine cargando, el 2 LED a la 12:00 posición deberá encenderse. Si espera un minuto, uno de los LEDs amarillos se enciende. Por supuesto, no puede programar el tiempo ya que los botones no se han soldado todavía, pero que vendrá más adelante.
Si obtienes un error de programación, use un multímetro para verificar dos veces todas las conexiones. Además, asegúrese de que tiene los pines TX y RX en el lugar correcto.







")





