Paso 2: Base y servo de montaje
Construí el reloj todo en una caja de acrílico transparente para visualización de baloncestos.
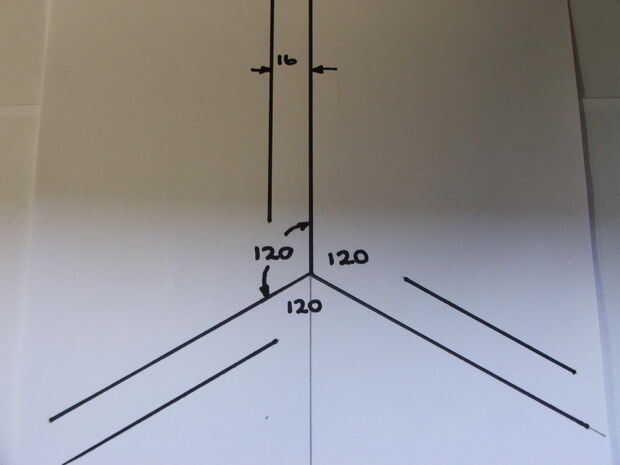
Este primer paso es quizás el más crítico. Un robot delta depende de la geometría y es importante que los servos alineados correctamente.
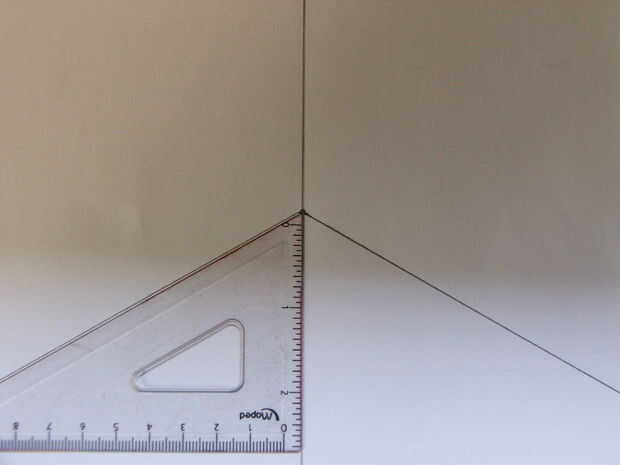
Marcar el punto central en la pared posterior de su caso y dibuje tres ejes hacia afuera con 120 grados entre cada uno.
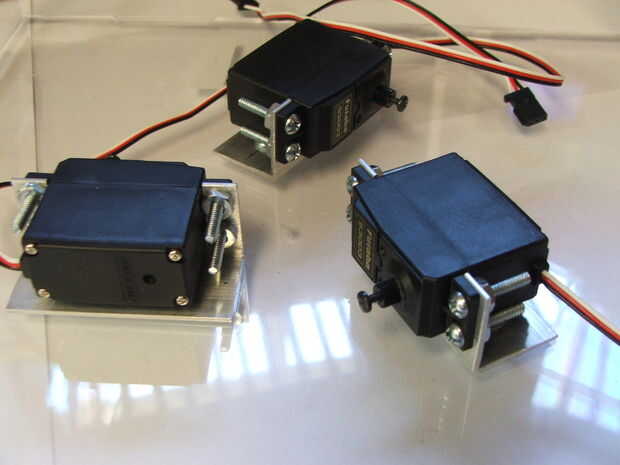
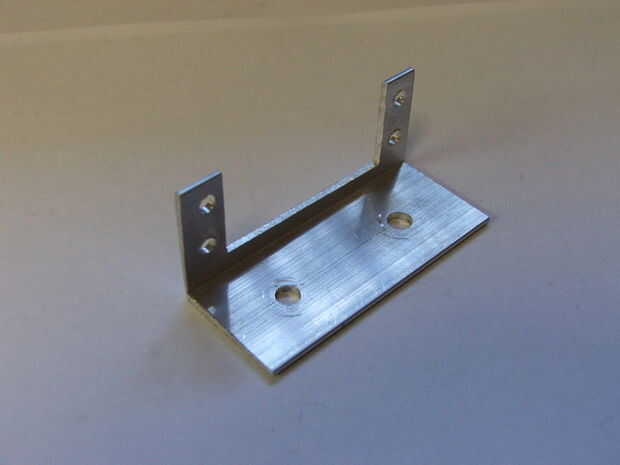
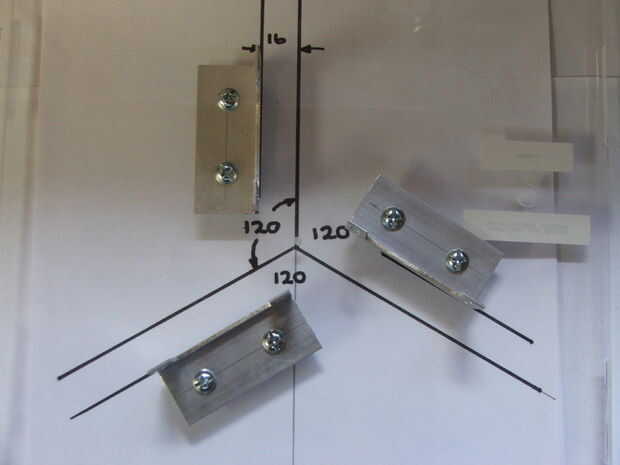
Usted puede cualquiera compra servo monturas o como ha creado algunos de una pieza de aluminio.
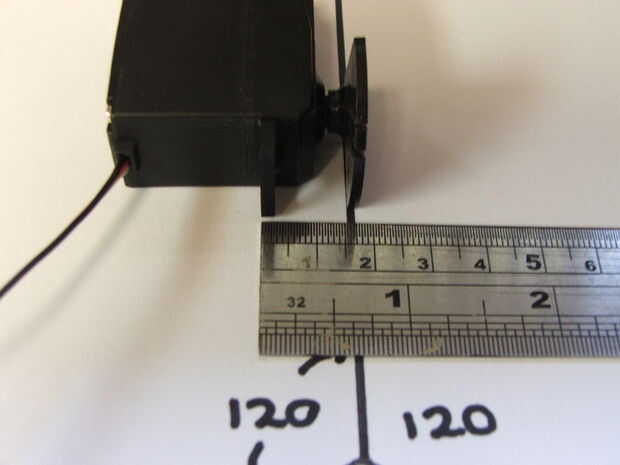
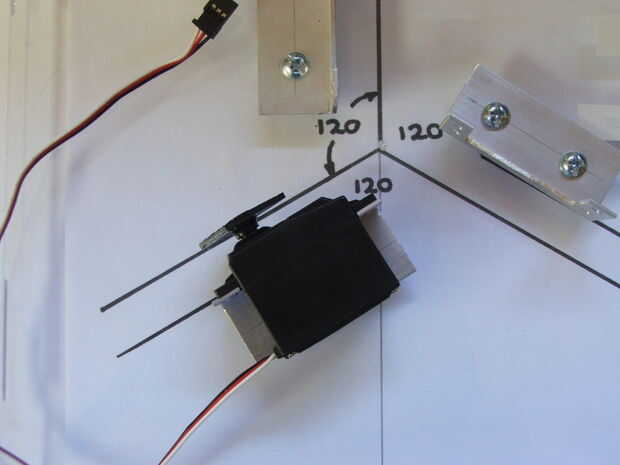
Los servos deben ser montados de manera que los cuernos servo son equidistantes del punto central y el centro del Baje el brazo cae a lo largo del eje. Para mi diseño esto significó el cuerno del servo alineado con el eje marcado.
En este caso la distancia del punto central del eje del servo es de aproximadamente 50mm.
")











