Paso 11: Versión prototipo-bits de electrónicas
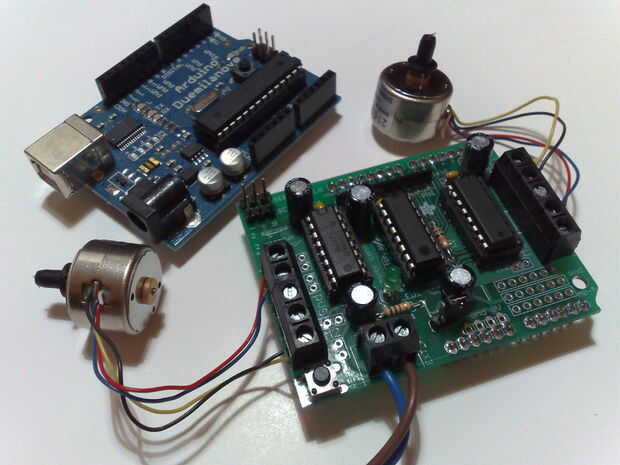

Es sencillo. Hice algunos cables de extensión con algunos encabezados de 4 pines porque los steppers que tengo suceden que ya tiene conectores de poca equipados, y los cables les son diminutos y frágiles de todas formas.
No puedo dar una buena introducción para steppers aquí (no sólo porque no sé mucho acerca de él mismo), pero más o menos: cada paso tiene dos bobinas en el mismo y pulsando estas dos bobinas en una secuencia determinada y polaridad (cuatro pasos) hace que el rotor gire en una dirección determinada. Las dos bobinas están separadas en un bipolar paso a paso como estoy utilizando, así que tiene cuatro hilos que salen del motor. (En realidad tengo cinco, porque estas son raras, pero que sólo uno de ellos corte.) Los motores exactos que tengo aquí son la misma clase que se describe en detalle sobresaliente en este instructable brillante.
Dos de los cables se conectarán a una de las bobinas y los otros dos se conectarán a la otra bobina. Utilice un multímetro para verificar la continuidad a la figura hacia fuera que. Luego conecte un par a la salida de la terminal 1 y 2 de uno de los puertos motorshield y el otro par de 4 y 5. A menos que sepa las conexiones de tu paso a paso, usted podría haber acertado, o usted puede tener la polaridad de una de las bobinas cambiadas. http://digital.ni.com/public.NSF/allkb/0AEE7B9AD4B3E04186256ACE005D833B tiene una pequeña guia sobre él.
Para probar el programa sin tener que esperar un minuto entre cada señal física, cambie el valor de millisPerSecond en el programa 200 - esto se ejecutará cinco veces más rápido que de costumbre. También puede cambiar stepSize que modificará cuántos pasos el motor toma por garrapatas.













