Paso 7: Montar el servo de inclinación



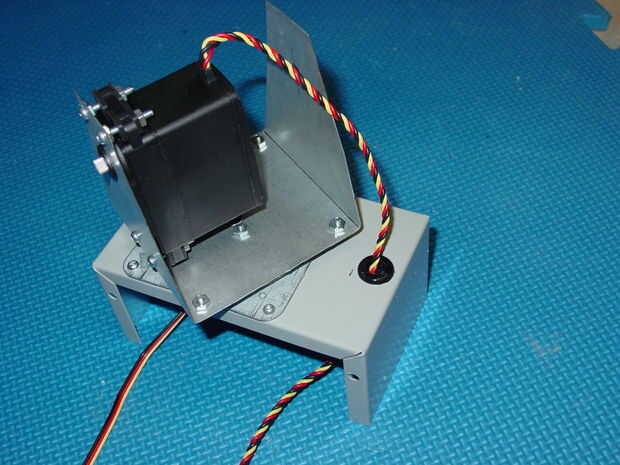



Montar el servo de inclinación grande con 8 tuercas y tornillos 4-40 x ¾". Empujar los tornillos por el lado de la caja de pedalier hacia el centro del soporte. Fije cada uno con una tuerca de 4-40. Empuje el servo en los tornillos. Otra tuerca en cada tornillo para sujetar el servo en el soporte del hilo de rosca.
Perfore un agujero de 7/64" a través del segundo agujero de centro del cuerno solo brazo servo.
El servo del centro pero esta vez usar el cuerno del servo solo brazo. Si no recuerda cómo centrar un servo, vea el paso 5.
Quitar el cuerno. Cuidado de no mover el eje.
Monte el soporte superior con el orificio grande sobre el eje del servo.
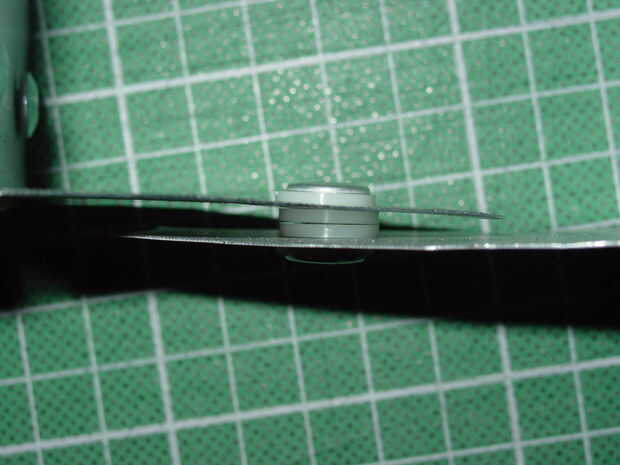
Asegure los otros extremos de las abrazaderas con un tornillo de Chicago conjunto y nylon arandelas. Tomar la parte femenina del conjunto de tornillo de Chicago y coloque una arandela en él. Luego deslice a través del pequeño orificio en el lado del soporte superior. Ahora Deslice dos más arandelas de nylon sobre el tornillo de Chicago. Ahora, inserte en el agujero pequeño en el lado de la caja de pedalier. Deslice una arandela de nylon más sobre el tornillo de Chicago y enrosque la parte macho en la parte hembra. Ahora tienes un punto de pivote.
Monte la corneta del servo para que apunte hacia abajo (hacia el gabinete de Hammond).
Hacer la plataforma superior paralelo con el gabinete de Hammond (o cubierta)
Marque el agujero que perforó en el cuerno del servo en el soporte superior.
Desmontar los dos soportes.
Perfore un agujero de 7/64" en el punto que marcó en el lado del soporte superior.
Enrosque un tornillo 4-40 x ¼" a través del orificio en el soporte superior que usted acaba de hacer. Pase desde el interior del soporte hacia el exterior. Coloque una arandela de 4-40 sobre el tornillo. Ahora ponemos el cuerno del servo sobre el tornillo y la rosca una tuerca 4-40 en el tornillo para mantenerlo en su lugar. El cuerno del servo debe centrarse también en lo 27/64" agujero perforado en el lado del soporte superior con la parte que conecta al servo hacia el interior del soporte.
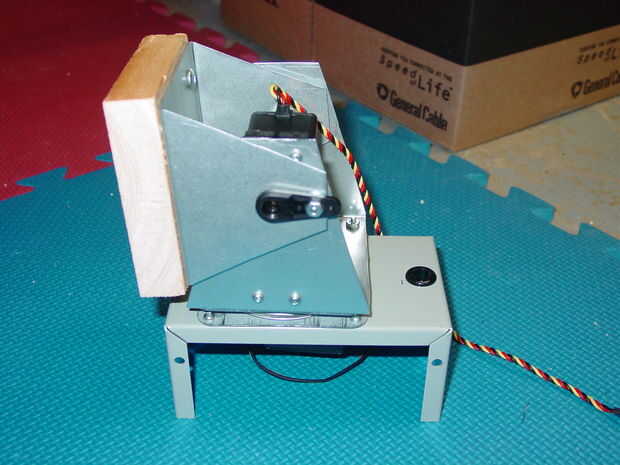
Vuelva a montar los dos soportes. Véase arriba. Asegúrese de después de conectar el cuerno del servo el servo que inserta el tornillo de retención.
Gire a mano el soporte superior. Los dos soportes deben estar cerca de tocar (preferiblemente sin realmente tocar).
Felicitaciones por hacerlo! Ahora Conecte el controlador de su elección y a que vaya. Voy a publicar un instructivo de como construir un controlador propio, tan pronto como lo consigo trabajando de la manera que quiero sin un microcontrolador!!!!













