Paso 1: Del modelo o elaborar un Plan de la estructura basada en sus necesidades de Robots

Las dimensiones del soporte del general será altamente dependientes de lo que usted está usando tu robot para y cuáles son sus necesidades. Éste está diseñado para la celebración de chapa de acero y aluminio para laminación en frío mediante un proceso de conformado incremental de un solo punto (SPIF) y también trabajará para algunos ligero fresado de madera y espuma.
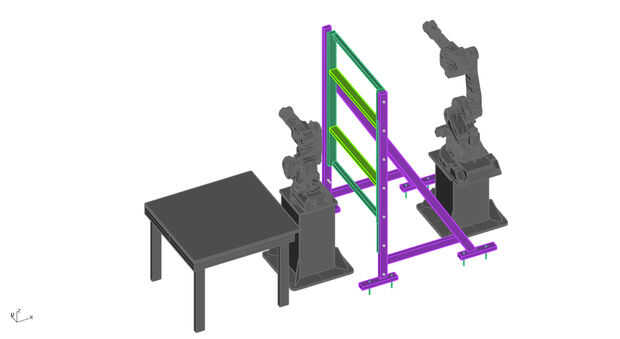
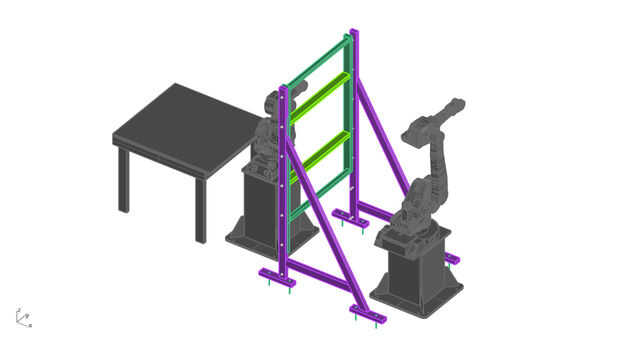
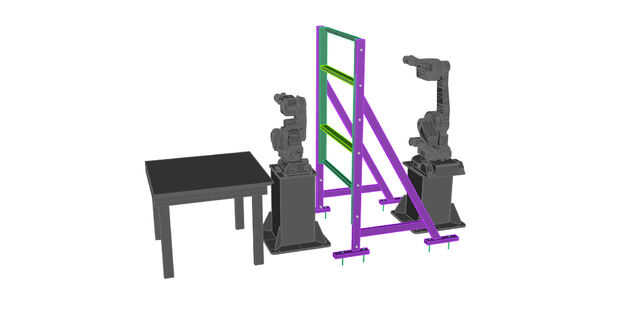
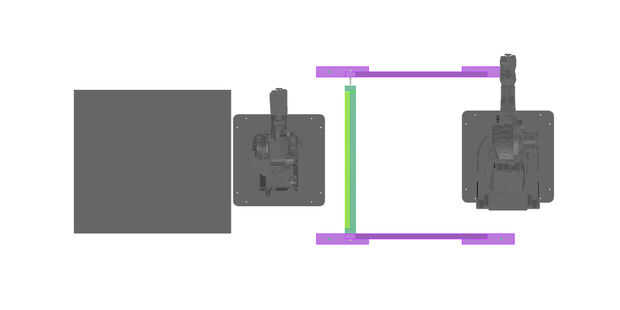
He incluido los planos de taller para las piernas y un diagrama de perspectiva global del tema completo.
Hay 3 partes principales:
1. las piernas (magenta) - las dos piernas son patas metal completamente soldado con autógena, simétricas que mantenga el material en el aire y tomar la carga lateral y la vibración de las herramientas.
2. marco (verde oscuro) - el marco es un marco soldado con autógena, pero tiene una matriz de agujeros de pernos en las patas. De esta manera puede mover arriba y abajo de las piernas para acomodar el alcance del robot. Los pernos son grandes pernos con arandelas para evitar que vibre suelta.
3. puntales desmontables (Lima) - estas costillas son dos brazos que se pueden quitar una hoja completa o añadidos para montar una hoja más pequeña para. También la caja de acero con extremos cerrados para atornillarlo.

")











