Paso 3: Diseño de circuitos
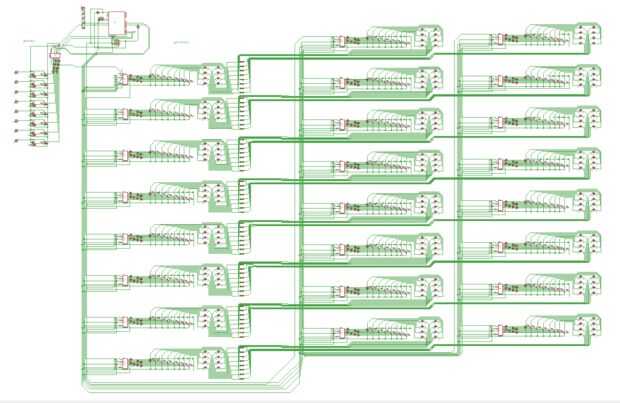
Saber cómo desea a Junta de trabajo nos lleva a diseñar realmente la circuitería necesaria para hacer funcionar el cubo. Sabiendo que vamos a usar un microcontrolador en el cerebro del cubo, y usando de alguna manera se conecta, lo primero que tenemos diseñar los circuitos para los ánodos y cátodos.
Los ánodos utilizará los MOSFETs canal P para cambiar entre las capas para la multiplexación. Mientras tanto, una matriz de transistores suministrará electricidad a los cátodos para cada columna de LED. Los registros de desplazamiento (74HC595) de control de la matriz de transistores por lectura en la salida serial del microcontrolador y convirtiéndola en una URL de salida en el registro de desplazamiento.
Permite descomponer aún más (omitir si entiende):
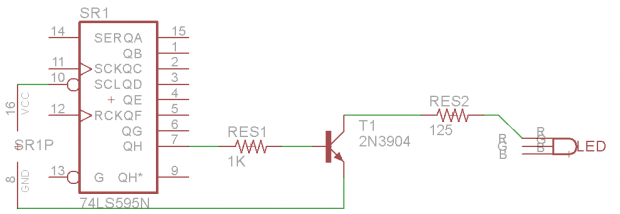
Cátodos de
(yendo hacia atrás desde el LED sí mismo) Un resistor de la serie establece el voltaje aproximado de destino para el LED (125 ohmios para el rojo, 100 ohmios para azul y verde). Esto está vinculado con el colector de un transistor que emite a la tierra cuando la base se activa mediante un pin de salida en el registro de desplazamiento con una resistencia de ohmios k 1 en serie (entre perno y transistor). A continuación se muestra un ejemplo con una línea conectada.
Cada registro de cambio tendrá 8 salidas para controlar 8 pernos. Ya que cada LED requiere de 3 pines (rojo, verde, azul) ya que hay columnas de 64 (8 x 8) tenemos que tener 64 x 3 = 192 pins. Esto funciona mejor si dividimos los registros de cambio en grupos de 3 (un juego para cada color). Así que ahora tenemos 3 columnas de 8 registros de desplazamiento (para un total de 24 registros de cambio hasta la fecha).
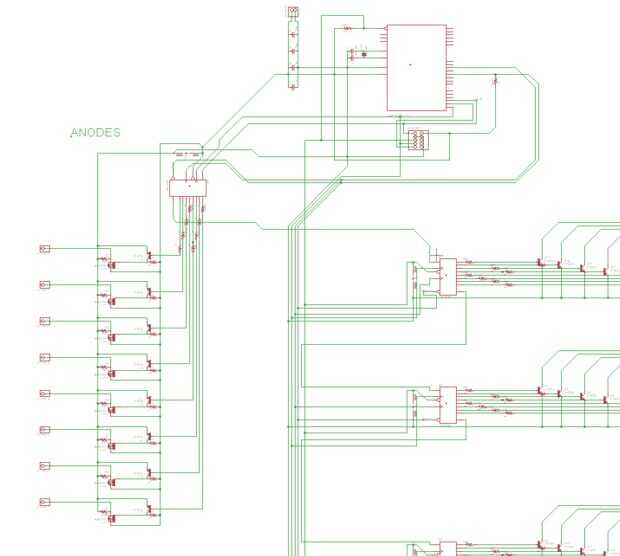
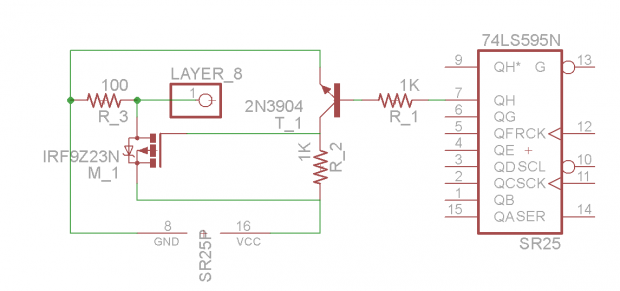
Ánodos de
Los ánodos de cada capa controlan activando un transistor (MOSFET abajo) desde otro registro de desplazamiento. Esta vez sólo hay un turno de registro. 8 había salida de pines en el control de registro de cambio 8 capas. Los valores de este registro de desplazamiento es cambiado de puesto hacia fuera en la misma línea serial que es entregada a cada uno de los otros registros de cambio desde el microcontrolador. Cada una de las otras capas, sólo copia el siguiente circuito y conéctelo a la clavija siguiente en el registro de desplazamiento.
Microcontrolador
El microcontrolador es un PU Atmega328P corriendo el bootloader de arduino. Hay 6 pernos principales que usted tenga que preocuparse (aparte de las líneas de cristal y de la energía): pin 1 - Reset, pin 4 - pasador, pin 4 - pasador, pin 6 - blanco, 17 - datos/MOSI del perno, perno 18 - MISO, perno 19 - reloj/SCK.
Pins 1, 7, 8, 17, 18 y 19 se pueden utilizar para proporcionar un encabezado de programación ISP para reprogramar el tablero más adelante si lo desea (no necesario).
El cierre, en blanco, datos y pasadores de reloj se utilizará para controlar el cubo a través de los registros de cambio. La clavija de enganche en el microcontrolador se conecta al pin 12 del registro de desplazamiento (74HC595). DATOS se conecta al pin de registro cambio 14. RELOJ se conecta al pin de registro de cambio 11. BLANCO se conecta al pin de registro de cambio 13.

Energía
La Junta requiere una fuente de alimentación de 5V. Para filtrar el ruido en la fuente de entrada, los condensadores se utilizan en algunas gamas. Esta parte es totalmente hasta usted por lo que es necesario sentir. He utilizado un 0.1uF, condensadores de 10uF 100uF y 1000uF pero esto era pseudo-arbitraria.

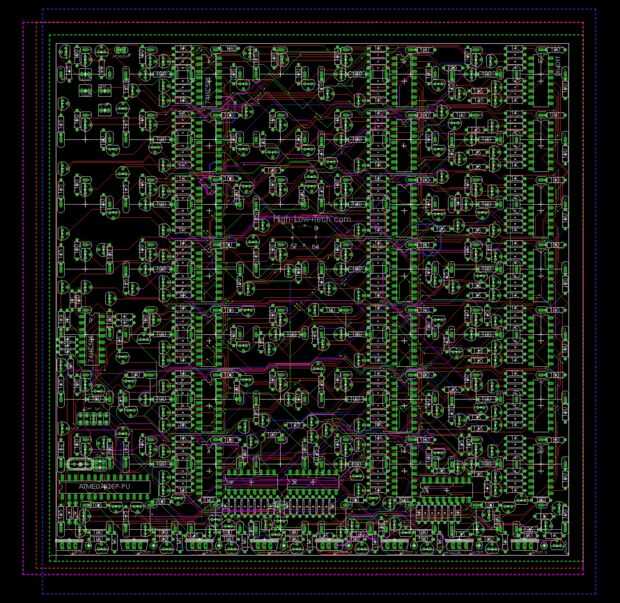
El esquema completo y todos los archivos de EAGLE tarjeta están incluidos en la carpeta zip en este paso. En él tienes todo lo que necesita tener las tablas impresas.










")


