Paso 10: El último de los cables

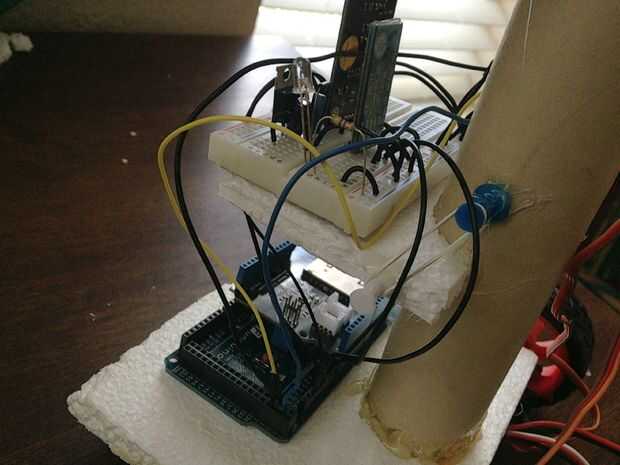


Bueno, en que los pasos anteriores estaba un poco vaga acerca de cómo ir alrededor de cableado el robot. Pues bien, todo ello confluye en una sola pieza sólida, funcional. Los pasos siguientes son los pasos finales necesarios para Constitución de Robbie. Sin embargo, prestar atención de cerca, ya que son muy importantes y fáciles de mal!
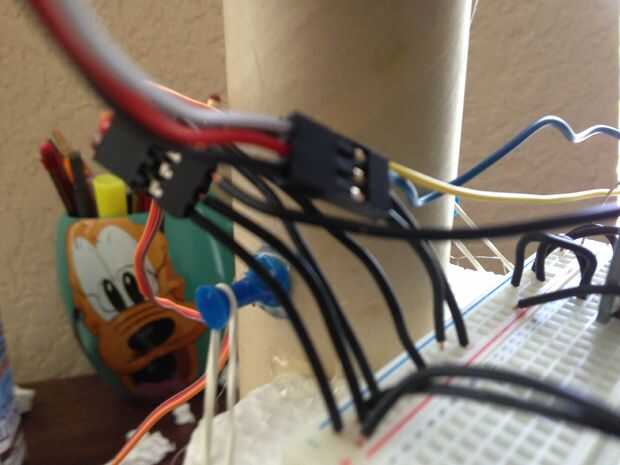
- Tomar el micrófono con el módulo de reconocimiento de voz y enchúfelo en el conector en el módulo. Tome el cable que lleva el micrófono real y enróllelo alrededor de la espina dorsal de Robbie, asegurándola con Scotch o cinta aislante.
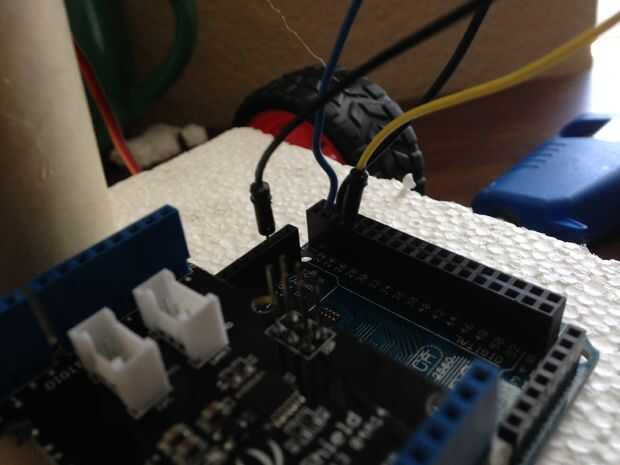
- Conectar el TX en el Bluetooth RX1 en el Arduino y la RX en el Bluetooth para TX1 en el Arduino.
- Repita el paso 2 para el módulo de reconocimiento de voz, pero esta vez con RX2 y TX2 en vez de RX1 y TX1.
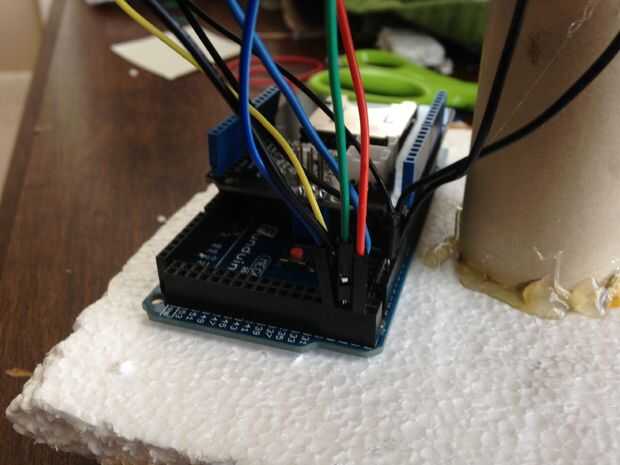
- Los servos deben estar conectados. Conecte el alambre de V de los servos (generalmente rojos) para las líneas de energía en el protoboard. Alambre de la tierra (generalmente marrón o negro) deben conectarse a las líneas de tierra de la placa. Por último pero no menos importante, conecte los cables de señal (blanco, amarillo o naranja, por lo general) a los pernos Ardunio. El servo continuo izquierdo va en el pin 22, el derecho continuo servo en el pin 24 y el estándar servo en el pin 26.
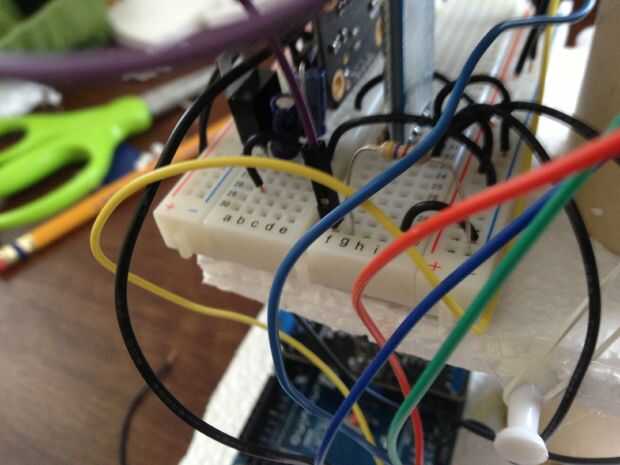
- Colocar un resistor de cualquier fila desocupada a tierra en el protoboard.
- Alambre común cátodo del LED a esta fila ocupada por la resistencia. Los pines del LED RGB rojos, verdes y azules van a los pines de Arduino 23,25 y 27, respectivamente.
- Conecte la alimentación en la placa para el pasador de Arduino con la etiqueta VIN y la línea de tierra a los pines de Arduino GND.
- Esto es opcional, pero lugar de amarre alrededor de los cables sueltos para el diseño compacto y hacer que el robot parezca más organizado.
Dése una palmadita en la espalda! Han finalizado con éxito edificio Robbie! Ahora la mayoría del trabajo se hará en el equipo.

 - No codificación requerida")
")
.")

")







