Paso 4: código

En esta sección, resumimos el código ARDUINO utilizado para entrenar nuestra RedBot con una red neuronal y un código de procesamiento para manejar el RedBot desde un mando a distancia.
El código de Arduino está embebido en el RedBot. El proceso es en un control remoto (PC). Ambos dispositivos se comunican a través de Bluetooth.
Código de Arduino:
Red neuronal Pseudo código:
- Tren de en que la red neuronal basada pre-procesado datos de entrenamiento.
- Iniciar los sensores
- Hasta el programa de salida de bucle
- Detectar la entrada de control remoto (Intro)
- W = hacia atrás.
- S = avance.
- A = izquierda
- D = derecha
- Z = sentido Sensor Metal (azul)
- X = sentido Metal y no metal Sensor (naranja)
- C = activar redes neuronales
- Escribir resultados de redes neuronales en Puerto serie.
- Detectar la entrada de control remoto (Intro)
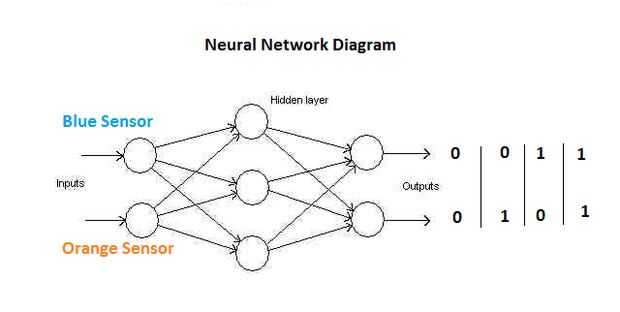
Red neuronal posterior propagación (NNBP) funcionalidad:
La NNBP se implementa con dos neuronas. Cada neurona representa la entrada de un sensor. Entrada de sensor es un binario (0, 1023) que refleja la ausencia o presencia del material.
Por favor, consulte el código adjunto - RedBotArduino.cpp
El código de Control remoto se implementa para que los usuarios pueden manejar los movimientos RedBot desde un teclado usando la teclas arriba, abajo, izquierdas, derecha.
Por favor, consulte el código adjunto - RemoteControl.pde


")

")


")





")