Paso 9: El brazo: la Base


El brazo del robot era mucho más difícil hacer luego el chasis. Uno de los mayores problemas que tuve con el brazo del robot era un problema con toque. El brazo que he diseñado tenía tres partes al igual que como un verdadero brazo. Tiene una base que puede girar el brazo de 80 grados izquierdos y derecho (~ 160 grados rango). La segunda parte es del arriba y abajo de movimiento que permite a la palanca mover arriba y abajo. (Punto más bajo es poco más paralelo al suelo y vuelve a 60 grados para arriba de allí). La tercera parte del brazo es la parte que se une a la segunda parte y también puede moverse hacia arriba y hacia abajo. (Esta parte puede casi doblar en la 2da parte o enderezar completamente). Hay una 4ta parte del brazo, la cabeza del brazo y la muñeca pequeña que le permite siempre poder tocar el suelo perpendicular a él. Estos fueron las 4 partes al brazo. Edificio aunque encontré que servos la mayoría eran demasiado débiles para hacer cualquier cosa en este proyecto pude encontrar servos especialmente alto esfuerzo de torsión.
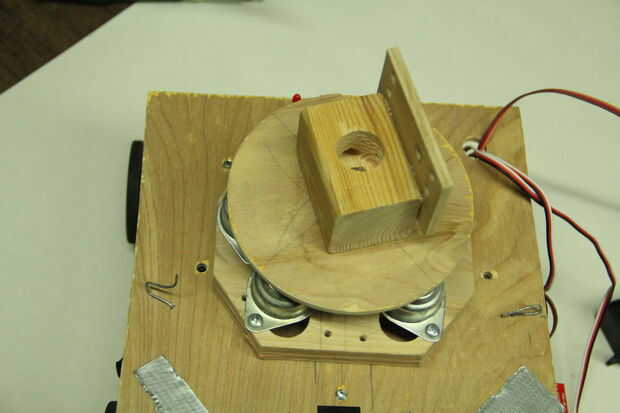
La Base de
El primer problema que enfrentó fue hacer la base. Quería tener un servo vertical con el eje apuntando hacia arriba. Esto le permitiría a una plataforma. Pero si tuviera que montar una plataforma directamente sobre el eje, el eje no probablemente no sea capaz de mantener y equilibrar la cantidad de peso y pondrá en un montón de tensión en tal pequeño motor/eje. Si yo fuera la construcción de un brazo de robot más pequeño y ligero, sólo montar la plataforma en el servo podría funcionar. Pero puesto que el brazo se iba a llevar un considerable alrededor de peso que decidí construir un "Lazy Susan" como base para el brazo en rotación alrededor de. Para hacer este "Lazy Susan" utilicé mármol previamente alojadas seis omni-ruedas. Eran un dólar en la tienda de hardware. Para construir esta base, tomé una pieza de madera y cortar un agujero para que quepa mi servo. Este agujero debe ser tan cómodo como sea posible pero sigue siendo capaz de ajustar el servo. La conexión después el servo marque los 4 agujeros que podrían entonces utilizar para atornillar y fijar mi motor. Una vez seguro que tuve que diseño mi 6 omni ruedas hasta formar un círculo alrededor del eje motor, observe cómo dije específicamente el eje. Esto es porque cuando la base de rota en el servo del centro del círculo es el eje y no el centro del servo. Tan organizar las ruedas de omni, así que están a igual distancia del eje y juntas como sea posible. Esto es para asegurarse de que la base es pequeña por lo que el brazo es lo suficientemente liviano como para el chasis manejarlo todo. Después de marcar los agujeros para las canicas, les perforé por lo que podrían utilizarse tornillos para fijarlos. (Siempre perfore un orificio piloto para los tornillos reducir posibilidad de partir la madera.) Una vez fijado montara el adaptador a una pieza de corte circular de madera. Esta pieza de madera iba a ser para la plataforma del brazo. Pongo mi pequeña plataforma con un adaptador en el servo. Luego examinó la base, desde los lados, dependiendo del servo y dimensiones de las ruedas, el servo podrían ser más altos que no permite las canicas soportar el peso del brazo. El servo también podría ser demasiado bajo, que esto dará lugar a no poder llegar a la plataforma y por lo tanto no podrá ejercer rotación del servo en la plataforma. Si tienes uno de estos casos, todo lo que necesita es levantar las ruedas o el motor con unas arandelas o incluso nueces. Después de la alineación, las ruedas deben apenas tocar la plataforma. Después de terminar la alineación, enrosque el adaptador que está conectado a la base en el servo y termine con la base.













