Paso 12: Dummy brazo: la Base





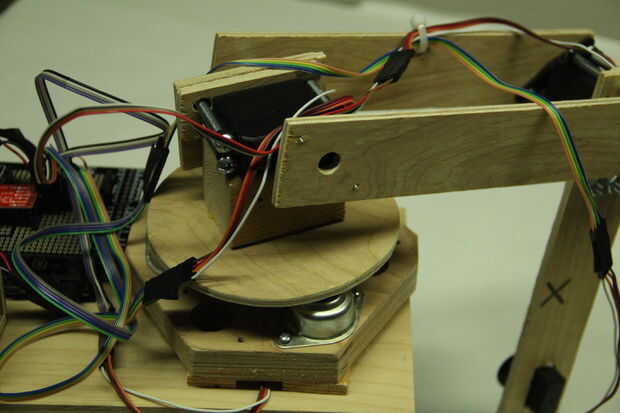
Este brazo es el controlador del otro brazo. El controlador no tiene que ser capaz de moverse para no tener que preocuparse por cuestiones de toque. Puesto que éste era el segundo brazo que hice fue mucho más fácil. Nota: Los pasos aquí son básicamente el exacto mismo tomé para mi brazo real por lo que no será descriptivo. Como el brazo antes, hice los mismos pasos para hacer este brazo. La primera de ellas siendo la base.
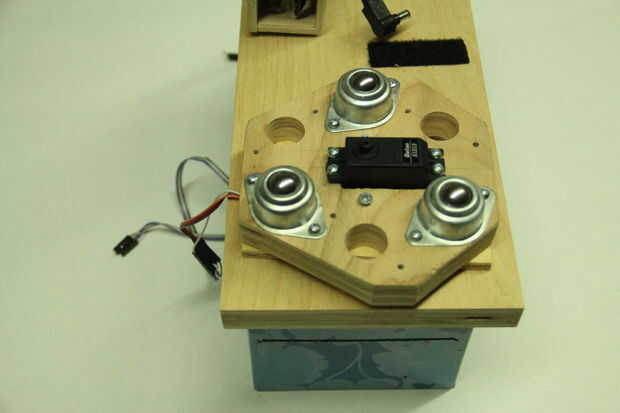
La Base de
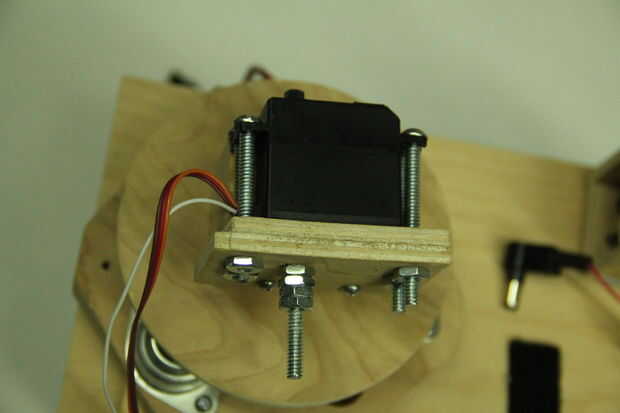
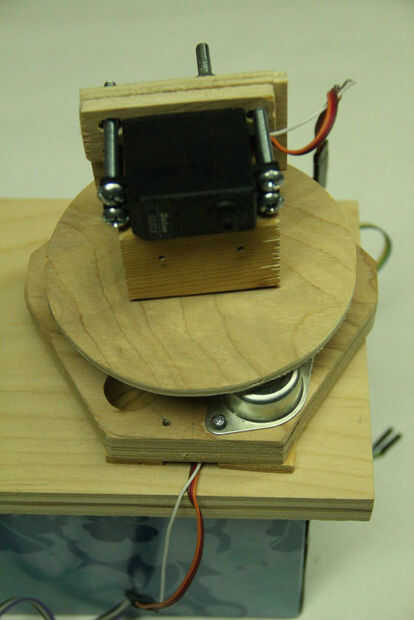
A pesar de que no era necesario tener una base estable (ya que el brazo no debe apoyarse) pero tener una base estable sólo produciría beneficios. Para hacer esta base he utilizado el mismo método que antes. Puesto que la base que tenía en el brazo real fue la segunda que hice (el primero fue para un diverso motor que no funcionaba) traté de salvaje mi base para ver si encajaría mi nuevos motores de retroalimentación, lo hicieron. Puesto que esta base no tiene que soportar tanto peso como la otra base sólo utiliza tres rodillos mármol. Tres de estos fueron suficientes para estabilizar la base. La primera junta como el otro brazo hacer el primer empalme pegado a un bloque de madera a la base. En el bloque de madera puse mi servo y había asegurado con mis pernos y soporte posterior. Contrapesos no eran necesarios porque el par no iba a ser un problema. Después de montar el servo he conectado mi extensión sin contrapesos y terminó la primera parte del brazo.













