Paso 1: opciones

Hubo muchas decisiones durante todo el proceso de construcción de este robot. Pero en este Instructable voy a poner las más grandes y más importantes decisiones juntos, a la derecha aquí en el principio.
Mando a distancia contra IA
Cada robot tiene que tener alguna manera que es controlado, el robot puede ser controlado a través de algún tipo de programa de lazo AI por ordenador, o el robot puede ser accionado a distancia, haciendo movimientos basados en entradas del usuario! Mientras el robot ultrasónico, (el otro proyecto que hice con Arduino,) decidí hacer un robot de bucle de AI. Yo sabía que esto iba a tener que explorar el Reino del control remoto para mejorar mis habilidades de Arduino más tiempo. (Robots de bucle de AI de hecho son más difíciles de perfeccionar porque necesitan la capacidad de reaccionar al exterior sin un usuario diciéndoles qué hacer en cada momento. Pero porque no había hecho un robot control remoto que pensé que sería interesante si he probado algo nuevo. Más robots de controladas remotos son más divertidos para jugar con después de la terminación del proyecto!)
Comunicación
Después de decidir que esto iba a ser un robot de control remoto necesitaba una manera de decirle qué hacer. Necesitaba una vía de comunicación. Para la comunicación, había pocas opciones. El primero de ellos es la vieja escuela con cable de comunicación. Esto habría sido el método más fácil de implementar, pero comunicación por cable es "Vieja escuela", la tecnología está avanzando y wireless se ha convertido en una necesidad de nuevos dispositivos. (Ej. inalámbrico carga, teléfonos celulares, inalámbricos teclados y ratones, etc..) Comunicación por cable también limitaría la gama de la robusteza, no permitiendo que se mueva sin un hilo de "cola". El método que elegí usar fue la comunicación inalámbrica conocida llamada Bluetooth. Sé que autos controladas remotas suelen utilizan frecuencias de radio y ahora que estoy volviendo a este proyecto creo que utilizando frecuencias de radio en lugar de Bluetooth podría haber sido una mejor idea de este proyecto específico. Pero volviendo a la meta que tenía en mente, fui con Bluetooth para la experiencia! Sentí que otro proyecto se haga en el futuro con un Arduino controlar usando teléfonos inteligentes y otros dispositivos Bluetooth, así que opté por usar el Bluetooth para este proyecto! (Lo malo es el lag. Si alguna vez hice un v2 exploro con señales de radio en lugar de otro.)
Controlador
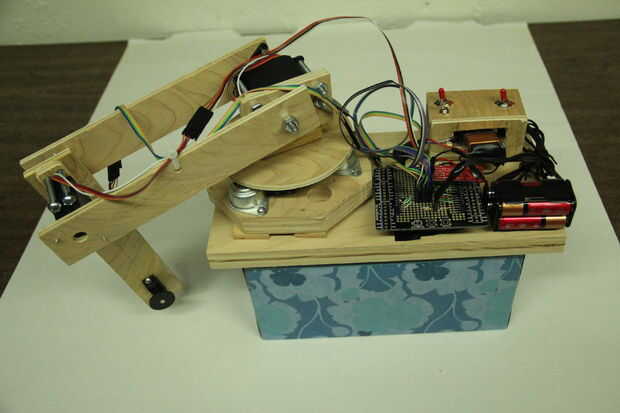
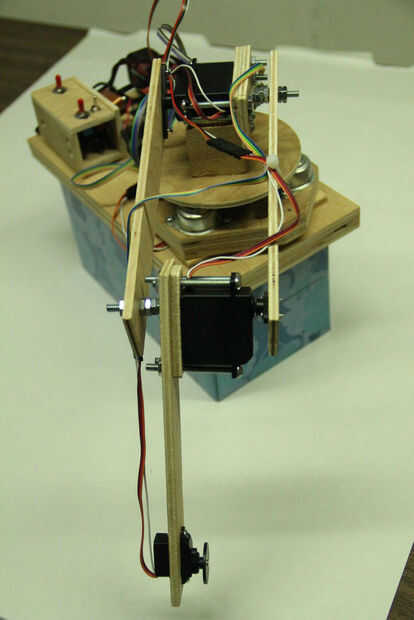
Ahora para el controlador. Yo sabía que me iba con el Bluetooth. Pero haciendo un trabajo de controlador es toda otra historia. Ya que mi robot es realmente dos partes, el chasis y el brazo, decidí dividir mi controladores también. Para el chasis, usé una simple aplicación para android para controlar el movimiento del robot. La aplicación para android fue escrita por mí mismo usando App Inventor del MIT. (Entraré en más detalle en uno de los pasos). Para el brazo, usé un brazo de maniquí robot que se imitan el brazo real. Al cambiar una de las articulaciones en el brazo del maniquí, el brazo real en el robot sería imitar la misma posición. Este método tiene muchos beneficios que incluyen, facilidad de aplicación y facilidad de uso. Si el controlador era también un botón basado en android de la aplicación que se moviera un motor único en un momento, moviendo el brazo a una postura específica hubiera sido un dolor. El único inconveniente de este método es la necesidad de construir un 2 º brazo que no es realmente que mal teniendo en cuenta después de construir uno todo lo que necesitas hacer es crear una copia.
Material
Antes de corte la primera pieza de mi chasis. Tuve que elegir el material que se haría de mi robot. Como usted pudo haber visto en las fotos que elegí para mina de madera! Sé que hay otros materiales que hay que pueden adaptarse este proyecto mucho mejor, pero opté por usar madera porque estaba confiado en madera! Yo sabía cómo manejar la madera bastante bien pudiendo utilizar las herramientas de poder básico satisfaciendo mis necesidades. (Herramientas básicas que utiliza son un taladro, un serrucho, una sierra de calar y una herramienta giratoria Dremel. Estas herramientas fueron las herramientas que usé para hacer mi proyecto pero sustituyendo el taladro hacia fuera para un taladro o una sierra para las motosierras son perfectamente razonables).
Tiempo para empezar a construir!













