Paso 3: El chasis
Tamaño
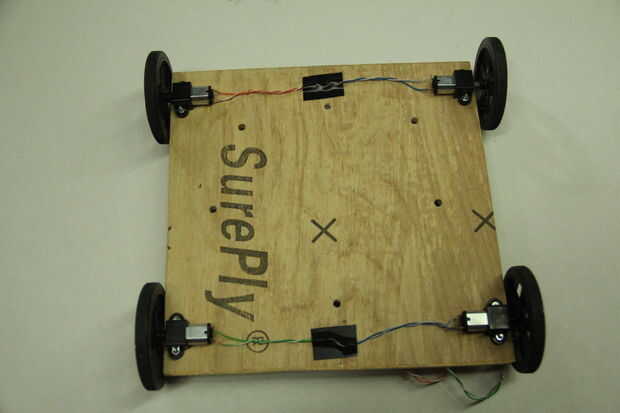
Cuando empecé este proyecto yo sabía que quería un robot pequeño pero estable. Mi criterio era bastante directo, debe ser un bastante grande caber mi electrónica, pero no demasiado grande y pesado que mi micro motorreductores no tienen suficiente par para manejarlo. Decidí ir con una plataforma de 20 cm x 20 cm.
Una vez que terminé de cortar el pedazo de madera contrachapada, marcó los agujeros para los soportes y perforados hacia fuera. Después de jugar un poco alrededor con un destornillador y las tuercas, había montado mi motorreductores sobre el chasis. No pude contener la tentación de colocar las ruedas así que los pongo a conseguir un look para el robot!
Escudo
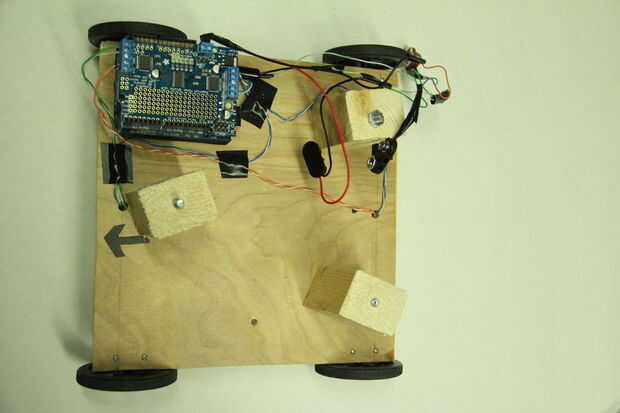
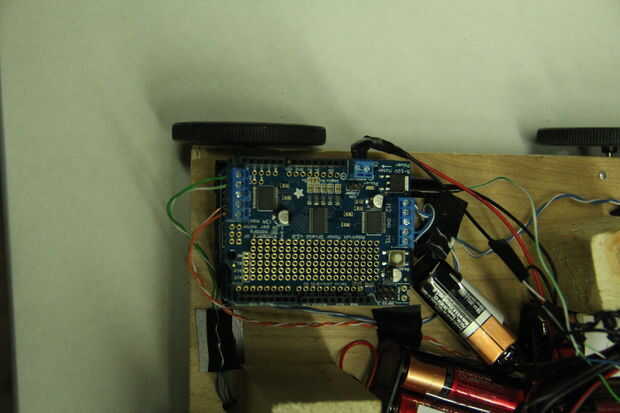
Como he dicho antes, el chasis del robot es la parte más fácil del proyecto, así que después del montaje de los motores, no quedaba nada para hacer sino para montar los componentes electrónicos y conseguir este robot en movimiento! Sacó mi polvoriento Arduino (que no ha sido tocado desde el último proyecto) y la v2 de Adafruit protector Motor nuevo que era sólo una bolsa de piezas. Adafruit Arduino escudos son geniales! Son fáciles de usar y pequeño no requiere solucionar problemas. La única pega de Adafruit escudos es la necesidad de soldarlos. Puedo decir que soy experto en soldadura y realmente no era un problema para mí. La única parte delicada fueron los pernos/encabezados que eran un poco más juntos, pero tengo bastante bueno en esto después de soldar cuatro de estos escudos de Adafruit. (Nota: escudos de Adafruit no vienen con headers apilables. Estos se compran por separado.) No voy a mostrar cada y nunca paso del escudo de Adafruit montaje ya que tienen una gran guía paso a paso en su página web haciendo precisamente eso.
Cableado
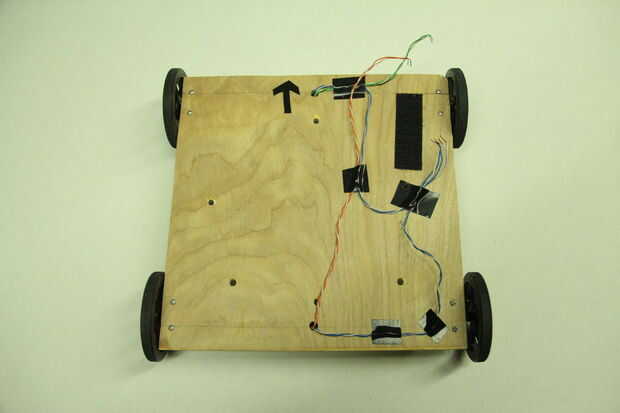
Una vez terminado el escudo lo es hora de ponerlo a utilizar. Perforé en unos agujeros en el frente y la parte posterior del chasis para llevar los cables de los motores al escudo. Yo entonces enganché mis motores, cada uno a un puerto de los bloques de terminales utilizando un alambre tenía por ahí. (Lo siento no tengo el calibre del alambre que utiliza.) Una vez que los motores fueron enganchados, conectado la batería utilizando un complemento de la batería de 9v. Una vez listo el cableado, he enchufado mi Arduino en mi ordenador y había subido un bosquejo de ejemplo ligeramente modificada que vino con el escudo de v2. Me modificó para motores de 4 y ajustar el modelo del bucle automatizado para probar la clase de movimiento. (Remite: todos los motores impulsando. Al revés: Todos los motores de conducción hacia atrás. Vuelta/girar a la derecha: lado derecho motores mueven hacia atrás como los motores del lado izquierdo seguir adelante. Turn/Rotate a la izquierda: izquierda motores retroceder como motores de derecha avanzar.)
Prueba
Una vez que termina el bosquejo subirlo es hora de encender la fuente de alimentación de Arduino y deje el chasis. Durante la sección delantera del lazo, asegúrese de que todos los motores se están moviendo en la misma dirección. Siempre es bueno elevar el chasis del suelo o sostenerlo para arriba en el aire durante la primera ejecución desde si los cables de los motores están/volteado al revés, el motor girará al revés haciendo el chasis encerrar cuando los motores se mueven en direcciones diferentes. Como he mencionado anteriormente, si los motores son al revés sólo tapa los cables en uno de los motores o en el escudo del motor. Después de asegurarse de que las obras función desviar correctamente Asegúrese de que usted marca la dirección hacia adelante es ya que el chasis es cuadrado y no tenemos manera de identificación. Además, no olvide comprobar el sentido de giro izquierda y derecha, asegúrese de que están haciendo la acción correcta.
Bluetooth
Después de ser capaz de mover el robot autónomo, era hora de conectar mi método de comunicación. Sabía que era Bluetooth debido a las decisiones en un principio, así que compré un escudo Arduino Bluetooth. El escudo que utiliza para Bluetooth era el escudo de Bluefruit Adafruit. Este escudo fue por mucho el más simples soluciones Bluetooth para Arduino. A pesar de que el escudo viene como un kit como el protector de motor, no necesita comandos AT o la calibración dura para utilizar este escudo. Todo lo que necesitas hacer es arrancar para arriba y conectar con un dispositivo Bluetooth. (Más tarde para el brazo del robot, utilizaré el HC-05 porque este escudo no era capaz de usar como un maestro, el controlador.) Así que después de la soldadura y montaje se terminó, había conectado mi escudo justo en la parte superior de mi escudo del motor que estaba en mi Arduino, realmente estoy empezando a pila de escudos. Por último, enchufo mi Arduino en el ordenador para subir un nuevo dibujo, que incluye del escudo de Bluetooth código de los recursos de Adafruit. Ahora es el momento para hacer este chasis - remoto controlado.













