Paso 14: Calibración y pruebas
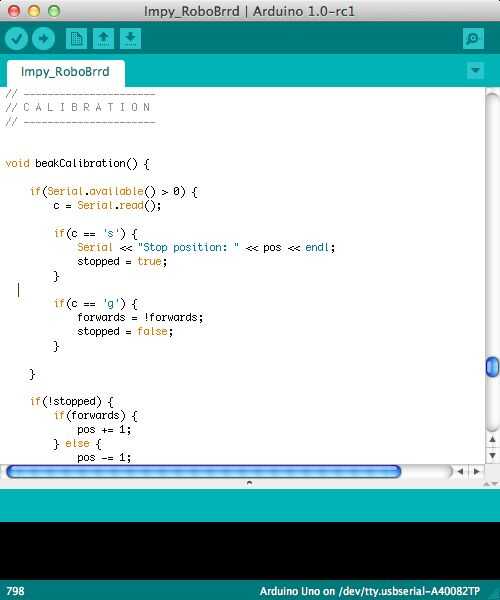
Para calibrar el servo, lo que tenemos que hacer es estrecho en el rango aceptable de movimiento. Lo que significa, tenemos que encontrar los límites superiores e inferiores para cada servo. Aquí es un ejemplo de una función para calibrar los servos de pico. El código fuente completo de este RoboBrrd se puede encontrar en GitHub aquí.
La idea detrás de la pieza de la calibración del código es que el servo lentamente comenzarán a moverse. Cuando llegue a la posición abierta, puede enviar de un ' a través del Monitor de la serie, y se imprimirá lo que es la posición actual. Recuerde que este número ya que será el límite inferior.
Envía 'g' para el servo mover la otra dirección. Cuando alcanza el pico cerrado, enviar de una ' otra vez y recordar el número que se usará para el límite superior.
Ahora puede código duro en estos números y ser capaces de utilizarlos como referencia para cuando escribes al servo.
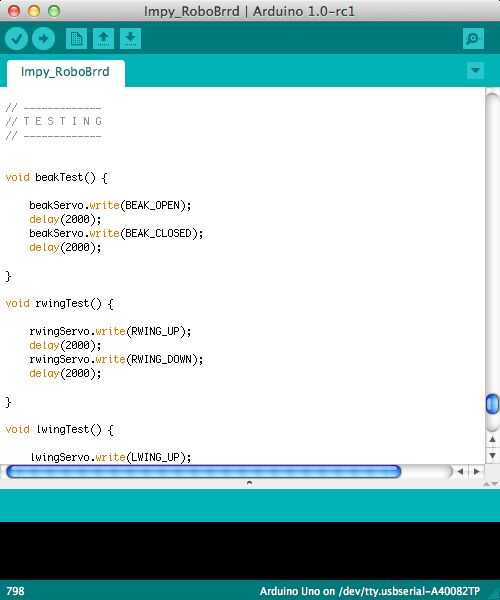
Para probar el servo, se abra y cierre el pico con un retardo de 2 segundos entre. Debemos comprobar y ver que el mecanismo está funcionando correctamente, y que el pico es capaz de abrir y cerrar.
Repetimos el mismo proceso para los servos del ala.
De las LDRs, queremos comprobar si están funcionando. Vamos a utilizar la biblioteca de Streaming que nos ayude a imprimir rápidamente las lecturas de la serie Monitor. Usted puede encontrar la LDR la función de prueba en el código en GitHub.
Pruebe las LDRs moviendo la mano delante de ellos, o alumbrando una luz brillante. ¿Los valores tienen una notable diferencia? Si no es así, compruebe que los cables están enchufados.
Los LEDs RGB se puede probar poniendo los varios pernos a alta o baja.
Asegúrese de arreglar cualquier cosa que es buggy o no funcionando suavemente antes de pasar al siguiente paso.
