Paso 2: electrónica



Electrónica de RoboDolly se compone de tres circuitos. Las siguientes descripciones le ayudarán a comprender la función de cada uno:
1) microcontrolador - este tablero interfaces con la mayoría del hardware y alberga el ATMega328 'cerebro' del robot. Se conecta directamente a la fuente de alimentación y energías de las otras tablas. Este poder puede conmutarse y apagar con la llave de "dura".
2) selector - conmutador sirve para dos propósitos: extiende las salidas del microcontrolador y los LED de las unidades. Se puede considerarse como un controlador de matriz. En mi diseño las columnas suministran energía a los ánodos de los LEDs y las filas están conectadas a los cátodos. Cada LED se enciende encendido abordando la correcta fila y columna. Una imagen es producida por la rápida exploración columnas de LEDs.
3) de la matriz - la matriz no tiene ninguna electrónica propia, ya que depende del conmutador para la función. Tiene una sola conexión para cada fila y columna.
Diseño de la placa
Las tablas para este proyecto fueron creadas en Fritzing. Es maravilloso software gratuito para principiantes. Encontrará los archivos de Fritzing para cada una de las tres juntas en 'RoboDolly_files/electrónica'. Con estos archivos, se pueden generar representaciones vectoriales (para grabado) y archivos gerber (para fresado automatizado). He incluido los archivos PDF que he utilizado para grabar cada uno de mis propios tableros. Debe ser impreso en tamaño real, y su tamaño debe ser verificado antes de grabado. Hay varios tutoriales en grabado de placas de circuito impreso en Instructables, así que escatimaré una explicación completa.
De soldadura
El procedimiento que suelda para estas placas son algo extraños. Lo mejor es echar un vistazo a los archivos Frtizing y entender las conexiones que están involucradas. Algunos de los componentes, incluyendo ICs y las resistencias, es necesario soldar en ambos lados de la Junta. Esto fue hecha para reducir la presencia de vías y reducir el tamaño de los tableros. Puesto que todos los componentes por-agujero, esto no es demasiado difícil. Sólo tuve problemas para soldar el zócalo del IC para el ATMega328, desde la parte superior de la mitad de cada perno está protegido por el plástico. Recomiendo usar una toma para sólo este componente, puesto que debe ser retirado para que el mensaje desplazable a introducirse.
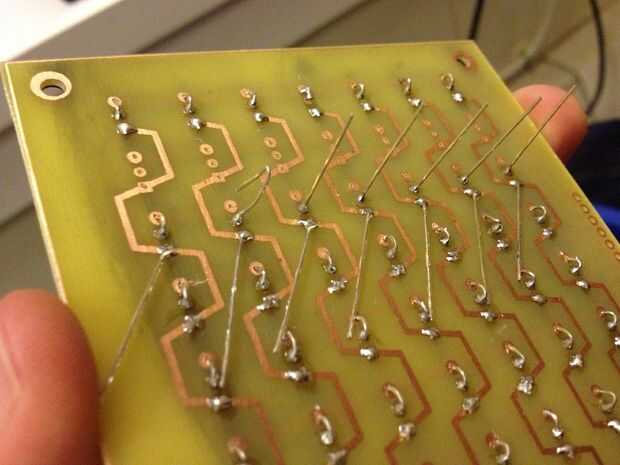
Para la matriz de LED, siga el método de soldado que se describen a continuación:
1) Inserte cada LED en su posición correcta, manteniendo la altura constante para todos los LEDs y verificar la polaridad antes de soldar.
2) suelda el ánodo (la parte posterior del tablero) y el botón solitario al lado de él. Esto protegerá el LED.
3) con un par de alicates, empuje el cátodo a través del tercer orificio. Suavemente tire de este plomo a través de todo el camino desde la parte delantera. El cátodo a la fila en la parte delantera de la soldadura.
4) verificar que cada LED se suelda correctamente conectando todas las columnas a + 5V y atar todas las columnas a tierra.
Ojos
El cableado para los ojos es bastante sencillo. Cada LED RGB debe montarse sobre un pedazo de perfboard, que se utilizará como una ruptura. El ánodo rojo debe combinarse con una resistencia de 150 ohm y los ánodos verdes y azules cada uno deben tener una resistencia de 100 ohm. En el lado opuesto de la ruptura, debe conectarse un cable de cinta de 4 hilos 15" a cada ánodo y cátodo común. Tomar nota de la configuración del cableado, desde el otro extremo del cable de cinta se conectarán más tarde al microcontrolador.
-Tablero conexiones
Es mejor en conectando entre sí los tableros hasta que todas las partes del robot se construyen. Longitudes de cable y separaciones son difíciles de determinar en esta etapa.