Paso 8: montaje
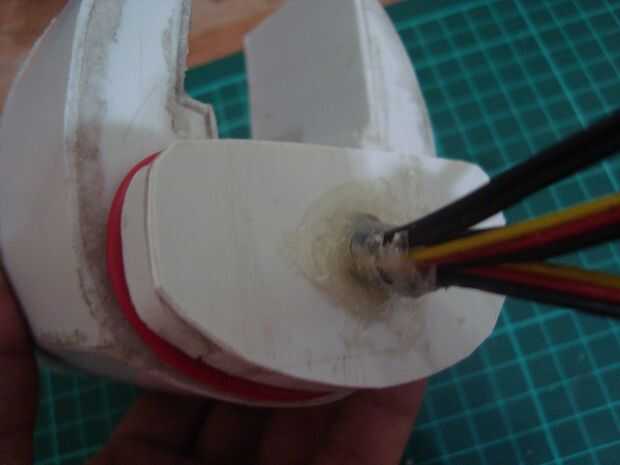

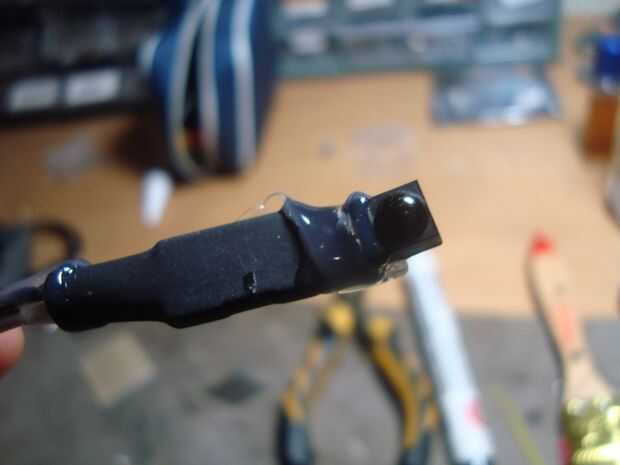















Bueno después de todo piezas terminen ahora nosotros todos balsa, previamente en la cubierta trasera seguridad caja hacemos agujeros para cableado, foto n º 1, el servo todo cable entrada agujero sensores, caja de seguridad y poner pegamento caliente en el margen del cable en el agujero para que ningún espacio para el agua de entrada, se me olvida poner pic de aspecto T-sop (receptor de infrarrojos en los ojos del robot pescado). no 2-5 para instalar el receptor IR.
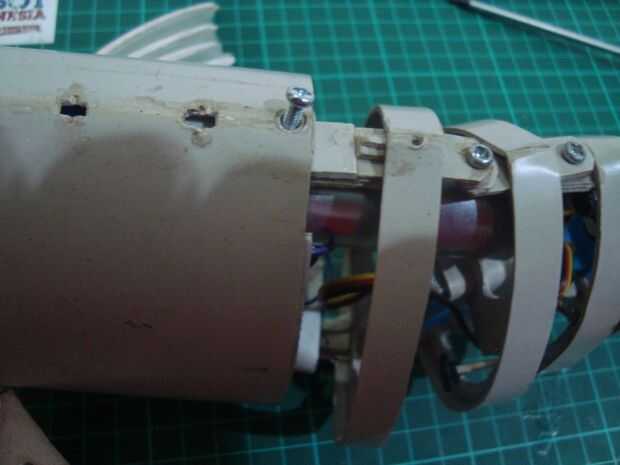
es el momento de montar todo, que previamente hacemos 2 agujeros con tamaño de servo cubierta Julio ambos lados de la colocación del agujero de cuerpo ideal sería poner las aletas. e instale el servo impermeable. UCAN utilizar pegamento caliente para instalar el servo en su lugar, entrada también caja de seguridad y tanque de lastre en el cuerpo de los peces robot, pares de pectorales aleta en el servo con una pequeña varilla que mismo tamaño con el servo de julio agujero y agujero de las aletas de la barra, así también con las aletas caudales. Mira la foto para más detalle. adjuntar la cola de los peces y ser fuerte con los acopladores agujero de acopladores en la anterior ya preparamos, y el último conectar la cabeza con el cuerpo reforzado con los acopladores que previamente preparamos ya el agujero del tornillo antes de.
Ahora ya tenemos un cuerpo de robot pescado completo. Proporciona la vida de un pez robot. Vamos a utilizar el mini Pro de arduino porque la forma es pequeña y puede caber en la caja de seguridad. Además también necesita promini arduino motor controlador para control de tanques de lastre, ubex para protección de potencia y 2 células lipo batería 1000mAh para el regulador utilizando TV romover. Usar el televisor alejado por un tiempo y jugado en una pequeña piscina con agua limpia o en un gran acuario, y IR puede penetrar agua por lo que todavía podemos controlarlo.













