Paso 8: Cable receptor RC al tablero de energía PICAXE
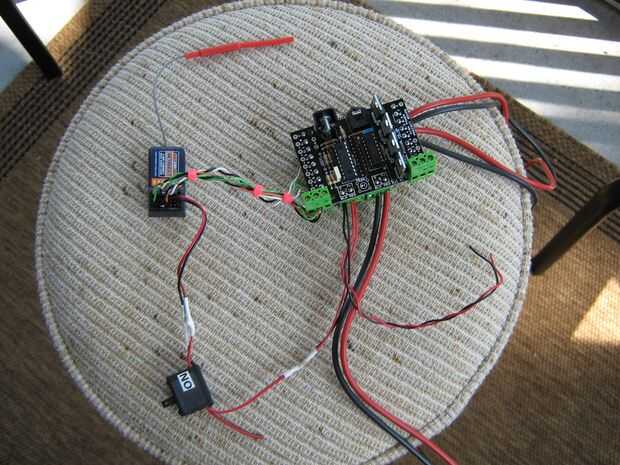
Realizan las asignaciones de canal: el joystick izquierdo hacia adelante mueve hacia delante, ambas ruedas izquierdas tirando que detrás de la palanca de mando invierte, y así sucesivamente para el joystick derecho. Para el pan y tilt servo en la parte superior del robot (que se monto la cámara inalámbrica de video en un día), apenas enganchar los servos directamente a los canales del receptor controlados por los botones redondos en el transmisor.
Mi esquema [Link] .








")

")


