Paso 1: Montar la plataforma de Kit
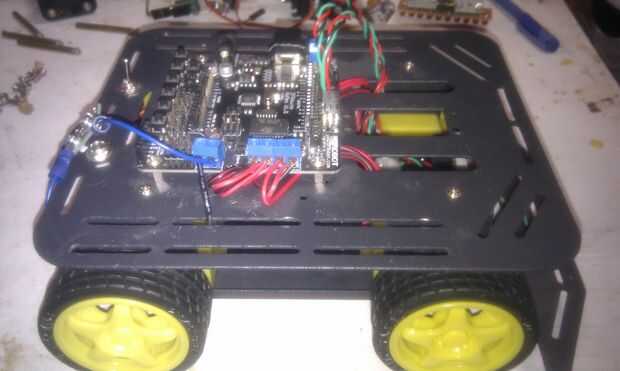
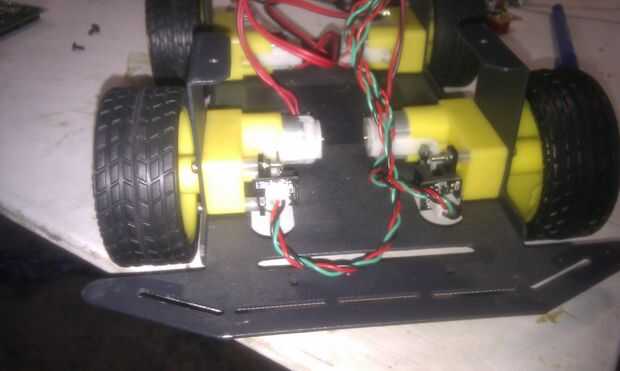


Desempaquetar y montar el kit base. Hay unas cuantas opciones para hacer. Decidí poner los codificadores de la rueda en las ruedas posteriores, aunque probablemente no importa. También encontré los separadores de 45mm muy excesiva, que tengo unos separadores de 5mm así que había utilizado. Los separadores más serán muy útiles más adelante.
Había enchufado los izquierda codificadores en el pin digital 2 en el Romeo y el codificador adecuado pin digital 3. La razón es que es donde se conectan las interrupciones en un Arduino.
Junto a los conectores de energía Conecte el "VIN = M_VIN" esto ahorrará conectar una segunda fuente de alimentación.
Asegúrese de que todos los puentes se establecen para que el Romeo utiliza pines 4, 5, 6 y 7.
La primera cosa que noté con este es que el paquete de baterías tiene 2 problemas:
1 - cuando las pilas se medio planas no tienen suficientes ronco para ser útil, haciendo de 1.2v recargable baterías completamente inútil.
2 - cambio de pilas es un dolor en el cuello.
Para superar esto yo utiliza una batería que lleva 6 pilas AA que tenía de un proyecto anterior. Esto puede ser montado detrás de las ruedas traseras y sujeta con Velcro.







")


")


