Paso 2: Sensores y montajes







Compré 1 longitud, y usa un hack vio cortadas en longitudes de 25mm (1"), usando los montajes del sensor que viene con el kit como guía. Utilizando los soportes kit como me guío perno de tres orificios que un M3. Utiliza una amoladora y un archivo para tomar de los filos. Hice un montón de ellas para su uso futuro, sin embargo hasta ahora solamente he necesitado 8 para este proyecto.
Compré 2 sensor de distancia - http://www.pololu.com/catalog/product/1134 . Utilizando dos de los soportes de montaje que hice y algunas doble cinta adhesiva une a la del robot, luego conectarse les digital pin 11 (izquierda) y el pin digital 10 (derecha). Estos sensores nos permitirá parar el robot ejecuta las cosas, también permitirá que el teléfono vibre cuando llegamos cerca de las cosas.
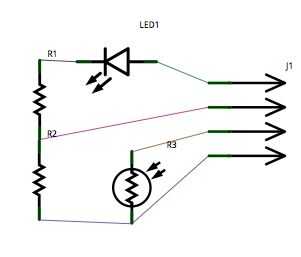
Entonces compré 4 protoboards - http://www.sparkfun.com/products/8886 , 4 X naranja LEDs, resistencias 4 X 330 ohmios, resistores de 4 X 10 K ohmios y 4 X dependiente de la luz resistencias y algunas salidas de pin header para hacer un 4 tableros que tienen un combo de LED y un sensor de luz. Originalmente usé cinta de doble cara para montar en mis soportes, pero mantuvo caerse así que decidí usar silicona para pegar en. Pegamento caliente realmente podría haber sido una mejor opción, pero no tengo ninguna.
Los LEDs son sólo para mostrar y llegaremos a ellos más tarde, la luz son sensores podemos poner el robot en modo de detección de luz y buscará luz. Por lo que deben ser montadas en los lados, hasta adelante y atrás y hacia adelante como sea posible. Yo también había doblado las luz resistencias lo que.







")


")


