Paso 3: Escudo de Romeo
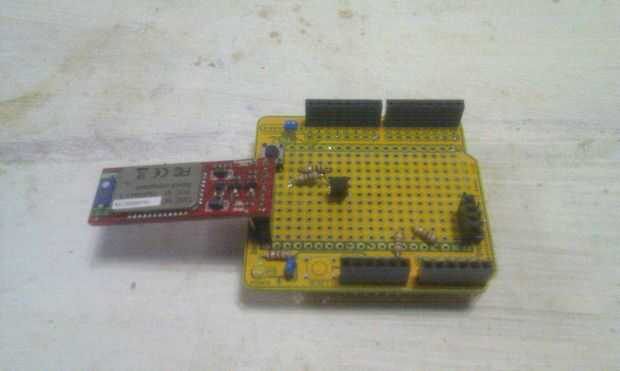


Nota que tiene headers y opcionalmente condensador, LED y resistencia.
Para conectar con el teléfono Android así que tenemos que añadir bluetooth, tengo uno de estos - http://www.sparkfun.com/products/582 . Esto por defectos espera mucho tiempo al principio para arriba, esto se puede cambiar y sugiero que hagas, lea el doco en el producto que se llega a saber.
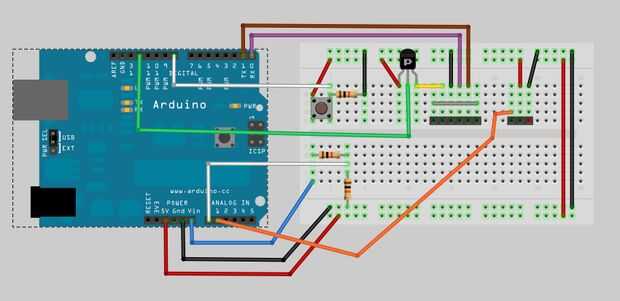
Cuando el bluetooth está conectado a los pines 0 y 1 se pone en el camino y no le permite programar el Arduino. La respuesta a esto fue para conectarse uno de digital hacia fuera los pernos, la alimentación de bluetooth como los pines digitales en un Arduino no puede suministrar suficientes amperios para alimentar el bluetooth he utilizado un PNP Tranzas como un interruptor que a su vez el bluetooth encendido y apagado utilizando los pines digitales. Para ello elegí el pin 12.
Quería saber cuánto carga fue dejada en la batería, usé un circuito divisor de voltaje básico y pin analógico 0 para averiguar cuántos Voltios hasta 10V son poner las pilas. Necesita dos resistentes a la de 10 K Ohm, poner resistentes a las en serie entre VIN y GND, conectan el pin digital 0 a entre los resistentes de dos a, esto le dará una tensión de 5 voltios de la lectura. Simplemente doble el valor y tienes cuántos voltios en el VIN. Pilas alcalinas dará casi 1,7 voltios cuando nuevo y 1.1 cuando son planas, las matemáticas es bastante simple calcular cuánto queda en la batería.
Pensé mientras que ¡ estoy revisando los voltios, así podría comprobar los amperios, por lo que he encontrado http://www.pololu.com/catalog/product/1185 y había conectado a la clavija analógica 1.
Por último quería el robot tener el potencial para tener diferentes modalidades, para cambiar entre los modos necesitaba un botón que al oprimirlos voluntad ciclo a través de las opciones. El Romeo tiene 7 botones conectados a los pines analógicos, sin embargo he utilizado todos los pines analógicos para otras cosas, por lo que necesitaba para añadir otro botón para pin digital 8.







")


")


