Paso 2: Los circuitos
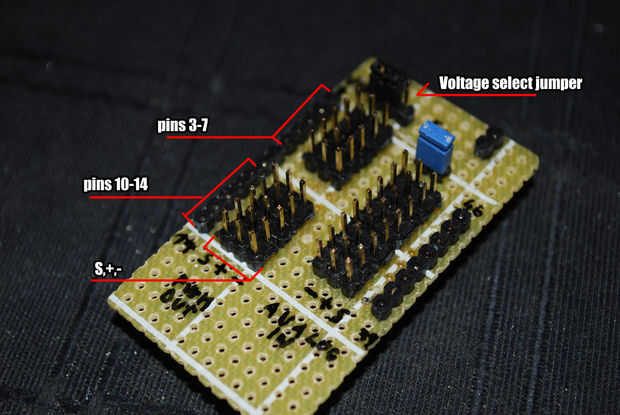


Puede utilizar escudo simple para IOIO (véase fotos), que romper los pines PWM. Hacer el PCB universal de forma de escudo. Puente conecta conectores de servo de forma de alimentación al pin VIN o 5V a bordo IOIO. Idea es: puede suministrar conectores de servo del regulador de IOIO. Y por otro lado, puede suministrar conectores de servo de forma IOIO placa con UBEC o algunos ESC.
El cableado es simple, puso el M1, M2, M3 y servo a pernos IOIO 10.11.12.13. Si eres buen programador puede acabar con esta configuración. Porque quiero probar paso a paso y quiere ser capaz de controlar mi UAV con mi Turnigy 9 x conectar receptor a digital los hoyos 3, 4, 5, 6, 7 (estabilización cuenta siguiente primero y autónoma).
Lo bueno es que el teléfono será cargado por lipo a bordo.
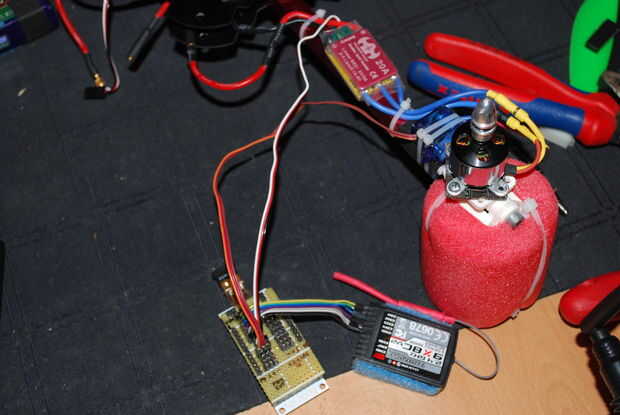
Para prueba propone utilizamos sólo receptor conectado a digitales hoyos 3, 4, 5, 6, 7, una ESC con ubec (conectado al pin10) y un servo (conectado al pin 11). Usted puede ver bluetooth dongle conectado al puerto USB de android ioio, usar bluetooth para depuración simple. Su teléfono puede todavía conectado a la PC via USB y puede comunicarse con ioio sobre el bluetooth. Es mejor usar cable de conexión entre ioio y el teléfono durante vuelos y pruebas a bordo (esperemos) :)
He hecho poca investigación acerca de modulación de pulso del receptor. He utilizado el analizador lógico de arduino. Señal modulada tiene período 20ms (50Hz) y la anchura de pulso alto es 1 a 2 ms (1,5 ms es centro). Ahora podemos leer y representar la señal con este conocimiento.
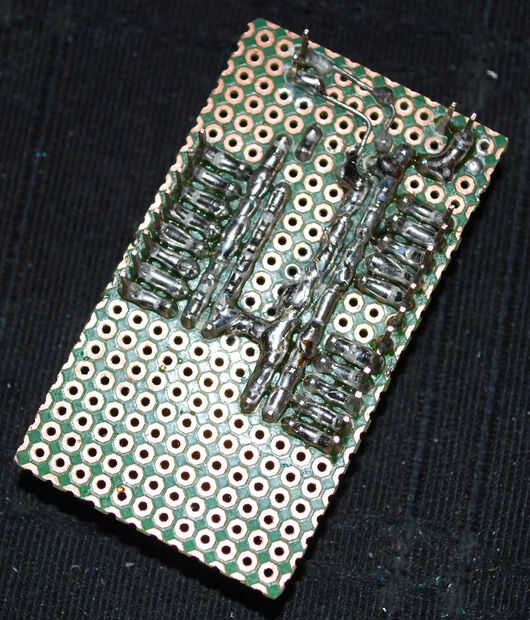
La parte hardware es relé simple, ¿no? Siguiente paso es la parte de software. Porque este drone depende en software en 99%, todo depende en la tuya y mis habilidades de programación.




")


 Stage1Model2")

")
")

 /w Arduino")
")