Paso 4: la tarjeta principal (parte 2: motores y sensores)
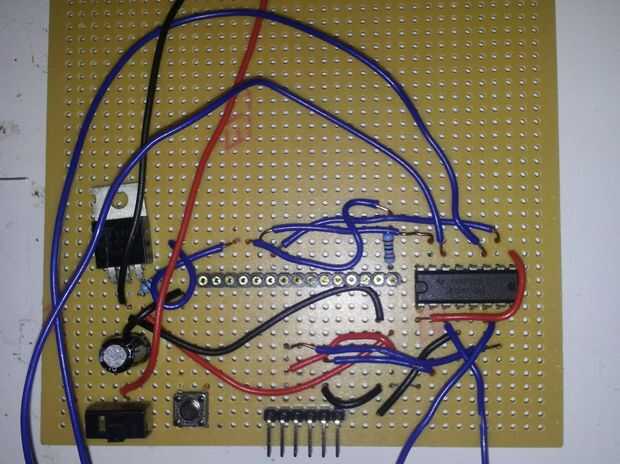
Después de la soldadura y pruebas, su dispositivo debe parecerse cuadro #3.
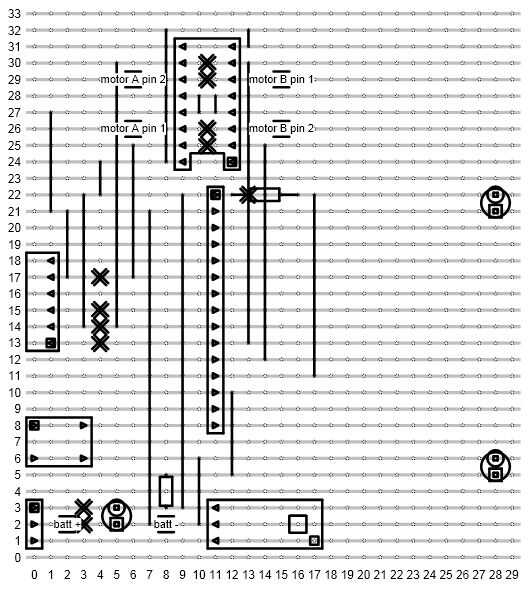
Tenga en cuenta que las fotocélulas no figuran en esta foto todavía. Estos son los 2 círculos en el lado opuesto de la Junta sobre el diagrama, por cierto. Es una buena idea para colocarlos casi al final. Usted verá por qué más adelante. Lamentablemente, esto significa que usted no puede comprobar si está trabajando aún en este tiempo ya sea.
Lo que hace que este paso sea difícil es que no hay mucho a él. No puede probar mucho hasta que se hace. Si tienes algún problema con este paso, o cualquier paso para ello, no dude en ponerse en contacto conmigo / deja un comentario. Los cables van a la parte inferior de esta imagen irá a los motores. Puede probar los motores colocando pinzas de cocodrilo y los cables y ejecuta la unidad, detener, izquierda o derecha comandos. Es probablemente una buena idea para colocar el dedo sobre el puente H y el regulador cuando esta encendido por primera vez con o sin motor. Si se calienta, desconectar y verificar cosas con su multímetro.
Si todo funciona, enhorabuena una vez más! Ahora, tenemos que girar a este lío de cables en un robot. Esta parte es un poco más fácil, y es mucho más fácil de localizar problemas. En electrónica, algo se calienta o simplemente no funciona y ver el problema puede tardar unos minutos. Por la mecánica, es bastante obvio para ver que el robot no es conducir porque apenas salió de la rueda.












")
