Paso 2: electrónica
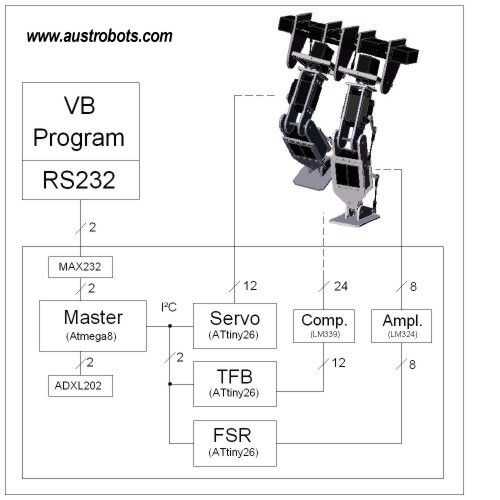
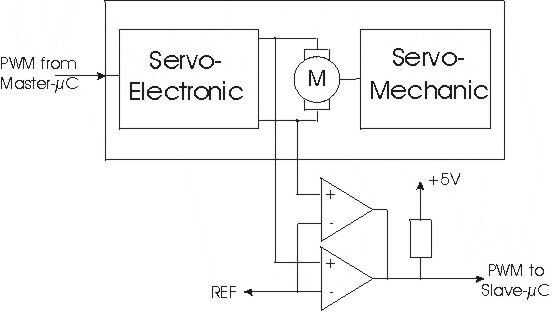
La medición de feedback de "par" muestras de la señal de control interno de los motores servo y proporciona información de la carga para mantener la posición deseada.
Con el cuatro FSR en cada placa es posible medir Si el robot está todavía en equilibrio mientras está parado sobre un pie. Si el centro de gravedad está dentro de la placa base del robot es estable.
Todos los datos de sensor es visualizada en el software.









")


