Paso 4: Controlador de MOTOR y MOTOR
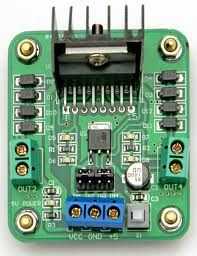

Puesto que la placa arduino puede suministrar sólo 5v que es insuficiente para la conducción de motor, controlador de motor se utiliza.
Con la ayuda del conductor del motor, rotación en sentido horario y antihorario del motor puede lograrse fácilmente. Conductor del motor debe ser alimentado con una tensión de alimentación de 5v-9v. Tierra debe conectarse en el conector de tierra de la placa arduino.
Ya que este robot tiene que llevar un extintor de incendios, motor del engranaje de la c.c. tiene suficiente par debe estar seleccionada. Aquí he utilizado motor de engranaje metálico con 60 rpm, con par de 10-12kg/cm.





")







