Paso 3: electrónica

Todo el circuito es controlado por 9 pernos en un arduino. Hay 3 pines digitales de entrada y 6 clavijas de salida digital utilizados. El uso de pin se detalla a continuación:
- Arduino pin 0 - salida - controla la plataforma rotatoria
- 1 - entrada - de la carrera para la inclinación de la cabeza del perno de Arduino
- Arduino pin 2 - entrada - de la carrera para el brazo
- Arduino pin 3 - entrada - de la carrera para la plataforma giratoria
- Arduino pin 4 cabeza - salida - se inclina hacia abajo
- Arduino perno 5 cabeza - salida - se inclina para arriba
- Arduino pin 6 brazo - salida - se mueve hacia abajo
- Arduino pin 7 brazo - salida - se mueve para arriba
- Arduino pin 8 - salida - controla un LED indicador
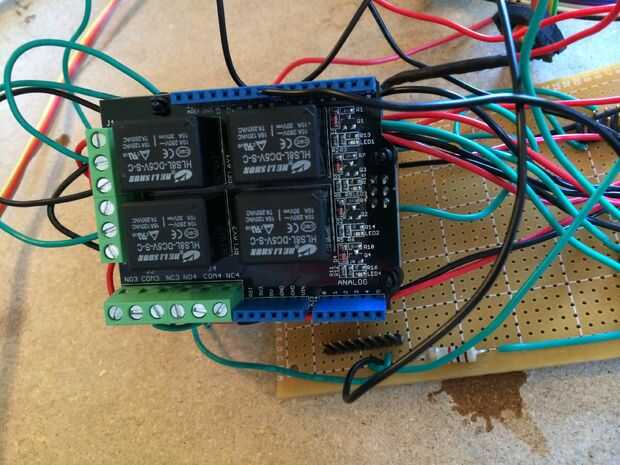
Pernos de control 4-7 el escudo de relé para operar el brazo y el lado principal del robot. Toda su electrónica están incorporado a la protección del relé. El pin común de relé 1 en la pantalla del relé está conectado con el cable positivo del motor de brazo. El pin común de relé 2 está conectado al cable negativo del motor de brazo. El contacto normalmente cerrado (NC) está conectado a tierra y normalmente abierto (NO) contacto de cada relé se conecta a 12V. La fuente de alimentación 12V debe ser proporcionada por una fuente secundaria de energía mediante cables o alimentar el Arduino de 12V y tomando la de 12 voltios antes de que se regula en el Arduino. Lo que significa que el motor se puede encender en cualquier dirección dependiendo de que está conectado el motor relé fuentes de 12V y que uno se hunde a la tierra. Si se apagan ambos relés o ambos se encienden, entonces el motor no se moverá. Nota: teniendo ambos relés en puede ser poco fiable, ya que todavía puede haber un pequeño cambio entre la línea de 12V a través de un relé y la línea de 12V el relé, causando flujo de corriente indeseable a través de los relés de encendido.
La rueda giratoria funciona de manera similar excepto sólo tiene un relé que ya sea encendido o apagado, por lo que el motor funciona sólo en una dirección. Como se muestra en la figura siguiente, el relé puede conectar o desconectar la línea de 12V el motor.
El indicador LED para la configuración que tengo me dice que cuando está bien para conectar la línea de alimentación de 12V. He dejado desconectada cuando el arduino se enciende y funciona a través de su ciclo de instalación porque algunos de los motores se enciende al azar durante la instalación. Por lo que el indicador me da una pausa segundo 4 en el código donde la luz se convierte en a me avisas es el momento de conectar la fuente de alimentación de 12V. Después de esto el LED no sirve ningún propósito.
Los interruptores de límite que todos siguen el mismo circuito para conectar al arduino. El robot utiliza lectura digital para decir cuándo se activan los interruptores y utiliza esa información para terminar de alinear cada motor.


")

")








