Paso 3: Alimentación I
PRECAUCIÓN: Los procedimientos tratan de 120 VCA (tensión de red) y deben ser realizados por aquellos que tienen conocimientos de alimentación y la electrónica. (240 VAC funcionará, por supuesto, aunque algunas partes tienen que intercambiar hacia fuera para aquellos que trabajan con este voltaje). Asegúrese que los cables pueden soportar el funcionamiento actual a través de ellos.
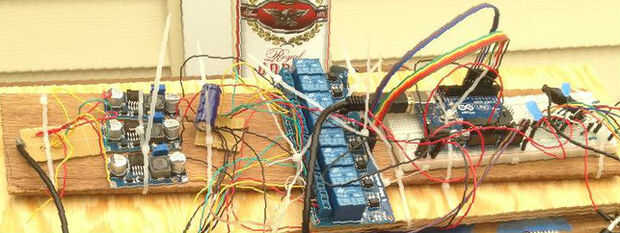
Este proyecto exige energía en al menos dos voltajes diferentes. Yo acabé necesitando 5, 6 y 12 VCC; 12 y 6 volts para los dos tipos de bombas (véase paso mecánico ) y 5 voltios para la otra electrónica. Una fuente de alimentación portátil estándar (~ 19V, 3.5A) puede ofrecer una suficiente potencia DC, y muchas personas tienen repuestos de computadoras viejas, lo que es una opción conveniente. Un convertidor del buck es un convertidor DC-DC que se utilizará para incrementar la tensión DC a un voltaje menor.
Lleve el cargador de la laptop (no enchufado) y cortar el conector de barril que se conecta a la computadora. Debe salir aproximadamente dos pulgadas de alambre en el extremo que está cortando a guardar y usar más adelante en el proyecto o para otro proyecto. Utilizar un pelacables para tomar la cubierta exterior del cable, luego tira de los alambres internos. Algunos cables tienen un único alambre aislado y un alambre de malla que lo rodea. Ese fue el caso en la mía.
Ahora necesita probar a la polaridad. Asegurándose de que los cables no toquen entre sí o con una superficie conductora, conecte los multímetro conductores a los cables y enchufe la fuente de alimentación, preferentemente a un protector contra sobretensiones. Establece el multímetro en la posición correcta y tome nota de la polaridad, luego desenchufe la fuente de alimentación. Una vez que tenga su polaridad puede comenzar a conectar la fuente de alimentación a los extremos de entrada de los convertidores del buck.
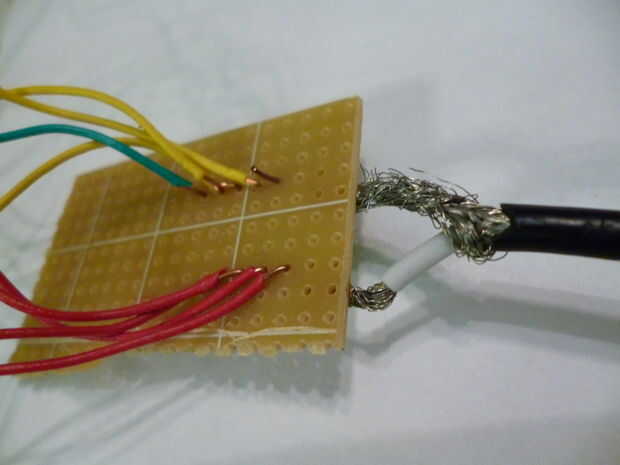
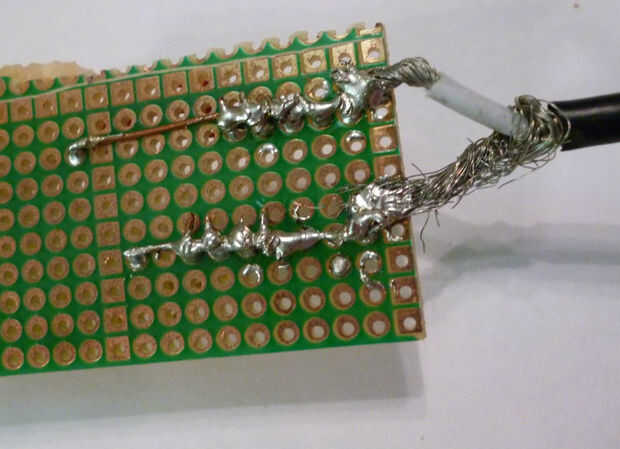
Explotó mi alimentación a una PCB, tal como se muestra en la segunda foto, al que conectado los convertidores buck. Si no utiliza un PCB con carriles de la energía, como lo hice, ejecute longitudes cortas de cable pelado de enganche en la parte inferior de la PCB para trabajar como carriles de la energía. Estos carriles son soldados en sus extremos a los topes. Cada uno de los cables de la fuente de alimentación están vinculados a uno de estos dos carriles. Entonces pueden soldar cables a la PCB, cerrar la brecha en el respectivo riel con soldadura como se muestra en la foto tercera. Entonces pueden soldar estos cables a la GND respectivo y + 5V salidas de los convertidores del buck. Puede cubrir cualquier cosa expuesta del cable con cinta aislante o encogimiento, recuerde deslizar el encogimiento del calor en el cable antes de soldar. Aislar las conexiones finales con un medio no conductor. El pegamento caliente es una opción común.













")