
INTRODUCCIÓN
¿Siempre quiso una Roomba, pero es demasiado caro para una pieza de plástico? ¿Por qué inventar su propio? Yo mismo, encontrar vacío limpiador / barredora robots demasiado demasiado caro y sobrevalorado. No hay nada absurdo en lo que no puede hacer su propio. También, hacer algo desde cero, para poder decir que lo hizo a ti mismo es algo que podrá disfrutar. Y más, para comenzar algo y poder terminarlo sin duda mejorar la capacidad de resolver problemas, no sólo en robótica, pero sobre todo en la vida.
A través de este proyecto, el desarrollador es capaz de reproducir, mejorar y probarse en número múltiple de las áreas. Puede decir que es un proyecto de "múltiples conocimientos", ya que tendrá habilidades y aprender en los campos de la mecánica, ingeniería eléctrica, programación y cálculo / numérico métodos en general. Se probará su capacidad de resolver problemas, y para tener éxito se necesita también una cierta dosis de creatividad.
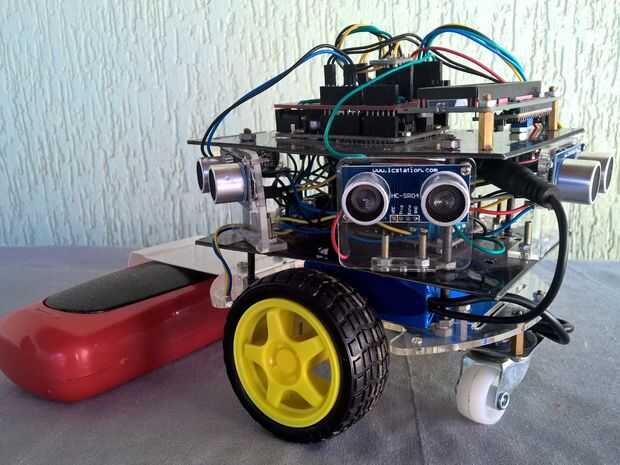
Bueno, eso es como comencé este proyecto. Con una idea en mente, sin saber exactamente cómo terminaría. Quería que mi Roomba hecho a sí mismo. Así que empecé a construir un robot de 2WD (impulsión de dos ruedas) con un Arduino Uno, algunos puentes de H y motores de corriente continua. Finalmente, mejoré poner sensores de ultrasonidos a fin de evitar obstáculos simples, como las paredes o mesas. Entonces, el proyecto comienzan a crecer, y he probado varios otros sensores, acelerómetros, para encoders de las ruedas, brújula digital.
Por lo tanto, llegué a un punto donde el robot ya es capaz de realizar sus tareas principales y la única parte donde hay campo de mejora es el comportamiento del robot hacia los obstáculos encontrados. No más necesidad de continuar el proyecto: consumado es. Quería compartir con ustedes chicos, podría hacerlo también y evitar algunos de los sufrimientos que pasó a través, y construir un robot aún mejor. Para comenzar a describir los puntos principales, aquí está la lista de sus características generales:
- 2WD robot, un motor para cada rueda;
- Limpieza se realiza con una barredora de alfombras conectado a un motor DC adicional;
- Motores son controlados por separado a través de dos puentes de H;
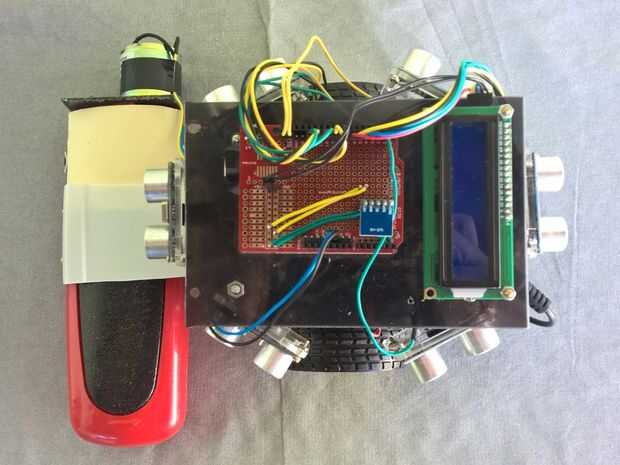
- Utiliza el método de control PID, implementado a través de Arduino;
- Ofrece brújula digital las indicaciones el robot va, para el control de las ruedas;
- Detección de obstáculos se obtiene con sensores ultrasónicos; *
- Posición de pegado puede encontrarse comprobación de los resultados de los sensores ultrasónicos; **
- Batería recargable capaz de ejecutar de una hora;
- Puede controlarse vía Bluetooth, y ya se implementa esta interfaz; ***
- Tiene un software específico de Windows Phone, hecho por mí mismo, sin embargo usted puede usar otras plataformas;
NOTAS:
* Es posible utilizar un módulo de infrarrojos con sensor fotoeléctrico de reflexión para detectar paredes, probablemente podría ser más eficiente, debido a que el infrarrojo es una buena opción para la detección de objetos que están muy cercano y el ultrasonido es bueno para las gamas de 10 cm a 2 metros. ** Un codificador con un sensor fotoeléctrico podría ser utilizado para detectar cuando el robot está atascado, solo con mirar si las ruedas están girando o no, sin embargo, opté por la opción más barata, una vez que ya estaba utilizando sensores ultrasónicos. El robot es completamente autónomo y evitar las paredes, por lo que la interfaz de Bluetooth sólo se utiliza si desea controlar el robot a ti mismo o pasar un buen rato!













