Paso 2: Soldando el eletronics



LO QUE NECESITA SABER:
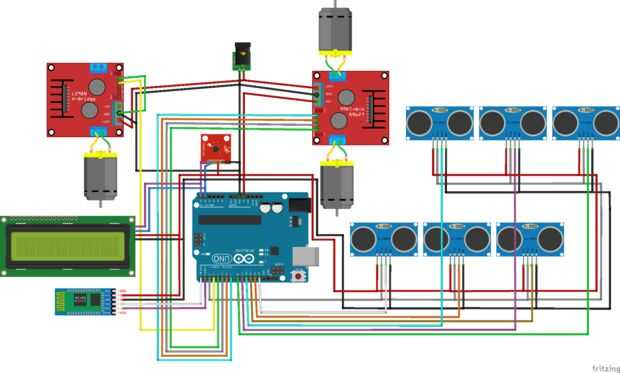
Antes de comenzar a soldar, debe observar en la figura anterior. Se puede utilizar entre 3 a 6 sensores de ultrasonidos. Si usas 3, tienes que poner uno delante del robot, y los otros dos 120 grados espacian unos de otros. El frente detectará objetos como vienen más cerca, y los otros dos se estará apuntando a la parte posterior del robot. Ambos encontrarán la distancia hasta el objeto más cercano (detrás), para que el "SweeperBot" puede decidir, si después de encontrar una pared, irá más a la derecha o más a su izquierda. Eso es porque, por supuesto, si después de encontrar una pared el robot iba recto hacia atrás, sería siempre va en línea recta y nunca le Limpie toda la habitación.
Si desea más información, más lecturas y por el robot para detectar objetos procedentes de los lados y también para detectar objetos detrás de él, puede utilizar todos los sensores posibles 6. Un método de control puede utilizar con el fin de evitar obstáculos es los campos potenciales, que hacen gran uso de esta información. Sin embargo he aun no implementado esto.
Sigue escribiendo sobre sonares, otra cosa que tomar nota es que, utilizando el código que le proporcionará a continuación que puede utilizar un cableado para todos los seis de ellos como el perno del gatillo, que significa que activará todos los 6 juntos, con el mismo comando. De esta forma se evitar el uso de más de 5 cables para desencadenarlos. Por lo general, utilizando la biblioteca estándar de este sensor, no puede hacerlo, porque cada sensor tendría problemas uno con el otro. Sin embargo, cada sensor tendrá su propio eco (pin y el cableado) porque, como sus lecturas diferencian, cada uno de ellos enviará señales diferentes al Arduino.
Los otros dos pasadores del HC-SR04 sonar son el positivo y la tierra. Estos dos son los mismos en todos los componentes electrónicos: la brújula, la visualización y el bluetooth. La brújula tendrá comunicación vía I2C (CII), al conectarse su SDA y SCL en el Arduino. Bluetooth conectará sus patillas de emisor y receptor a los pines digitales 0 y 1 desde el microcontrolador. Observe que la configuración se hace mediante software y si cambias estos pines la costumbre Bluetooth poder par al dispositivo. La pantalla también conectará I2C en los pasadores de la misma como la brújula, porque usando I2C Arduino puede controlar muchos dispositivos al mismo tiempo con los pasadores de la misma.
Comparado con el puente H, tienes que conectar activar y habilitar B con el conector positivo (que es por su lado, solamente use un puente) de lo contrario los motores no se ejecutarán. A continuación, Conecte cada motor a un terminal positivo y negativo del puente H (los pernos laterales con los tornillos), y los tres conectores con tornillos son: la tierra, que irá a la arduino y todos los otros dispositivos, incluyendo la batería, el positivo 9V-12V que proviene exclusivamente de la batería y los 5V que suministrará a todos los demás dispositivos que no son los motores de DC. Los conectores restantes son dos pares de la lógica de las señales para controlar la dirección y la potencia entregada a cada motor.
EL PINOUT:
- Brújula digital HMC5883L;
- PIN 0 - SDA >>> analógico Arduino Pin A4;
- PIN 1 - SCL >>> analógico Arduino Pin A5;
- PIN 2 - GND >>> GND;
- PIN 3 - VCC >>> VCC 5V;
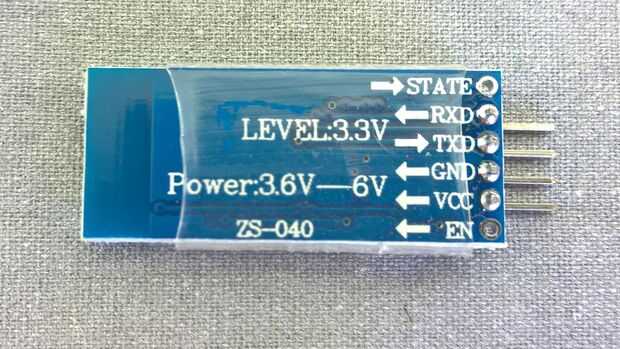
- Bluetooth HC-06;
- PIN 0 - RX >>> Pin Arduino Digital 0;
- PIN 1 - TX >>> Pin Arduino Digital 1;
- PIN 2 - GND >>> GND;
- PIN 3 - VCC >>> VCC 5V;
- 1 doble-puente en H;
- PIN 0 >>> Pin Arduino Digital 4;
- PIN 1 >>> Pin Arduino Digital 5;
- PIN 2 >>> Pin Arduino Digital 6;
- PIN 3 >>> Pin Arduino Digital 7;
- Permiten A >>> VCC;
- Activar B >>> VCC;
- Potencia >>> batería positiva 9 - 12V;
- Tierra >>> batería GND y GND de Arduino;
- + 5V a >>> Arduino VCC;
- 2 º doble H-puente;
- PIN 0 >>> el Pin Arduino Digital 3;
- PIN 1 >>> GND;
- PIN 2 >>> no conectadas;
- PIN 3 >>> no conectadas;
- Permiten A >>> VCC;
- Activar B >>> GND;
- Potencia >>> batería positiva 9 - 12V;
- Tierra >>> batería GND y GND de Arduino;
+ 5V salida >>> no conectadas;
- Pantalla de LCD I2C 1602;
- Pin 0 - GND >>> GND de Arduino;
- Pin 1 - VCC >>> Arduino VCC;
- Pin 2 - SDA >>> analógico Arduino Pin A4;
- PIN 3 - SCL >>> analógico Arduino Pin A5;
- 6 sensor de ultrasonidos HC-SR04;
- Pin 0 - VCC >>> Arduino VCC;
- Pin 1 - gatillo >>> Pin Arduino Digital 2;
- Pin 2 - Echo >>> conectado en los pines de Arduino Digital 8, 9, 10, 11, 12 y 13;
- PIN 3 - GND >>> GND de Arduino.













