Paso 3: Montaje del ROBOT
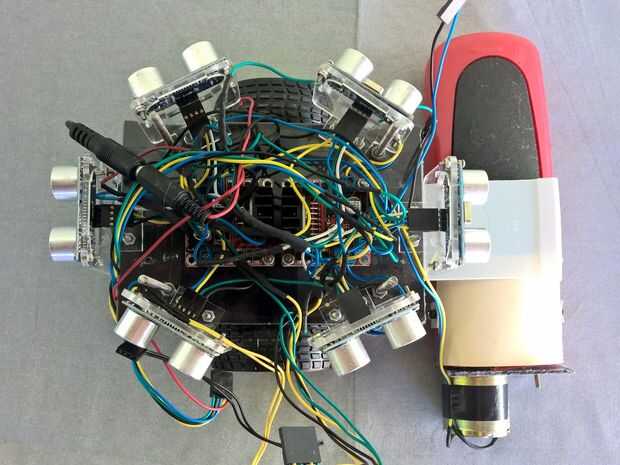
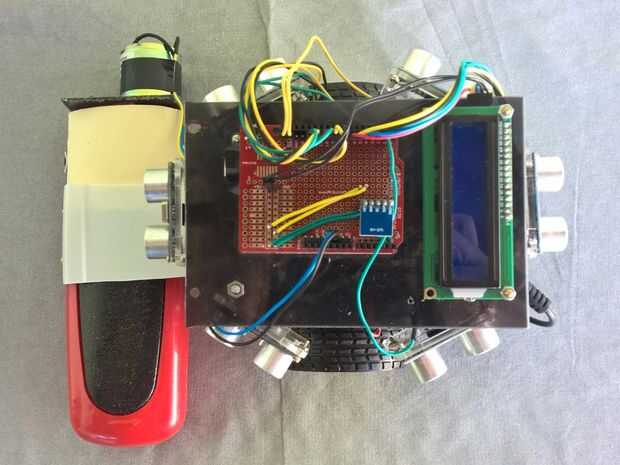


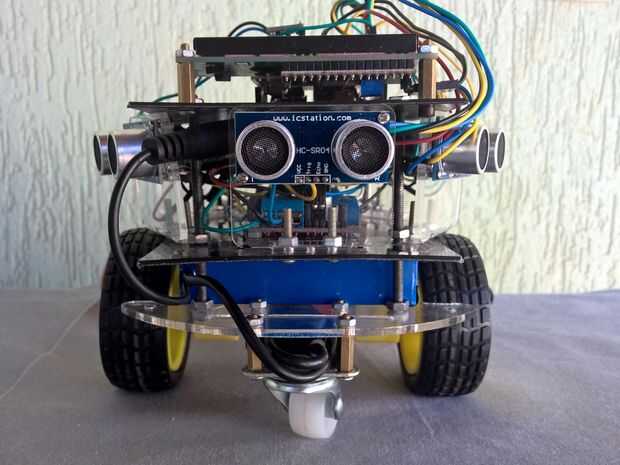
Conseguir el sensor de ultrasonidos fijos cada uno de ellos con ángulos iguales entre sí, por ejemplo, si utiliza seis, coloque el primero frente al robot y otros con 60 grados de ella. Utilice las placas de acrílico como capas del robot, por lo que es más fácil de montar y conseguir las piezas en posición. Tornillo todo en las capas y poner la batería justo por encima de los motores, pero en la electrónica. De esta manera bajar su centro de gravedad, por lo que es más estable.
La soldadura de todos los cables positivos juntos y los pernos de tierra también. Hice un conector con todas las clavijas de los sensores y el otro con los 5 pines de motores DC, por lo que ahora es más fácil de entender, al montaje y desmontaje. Colocar una capa final por encima de los puentes de H y poner allí el Arduino. Usé un escudo de prototipado sobre el microcontrolador, porque resulta más fácil soldar y fijar la brújula, que es una parte que necesita especial atención. No es necesario colocar en el centro del robot, pero debe estar distante de grandes piezas de metal, como los motores y la batería.
Es posible montar el motor de la C.C. junto con el barrendero de alfombra de diferentes maneras, pero algunos son mejores que otros. Porque tenía sólo un barrendero, mina consiguió un poco feo durante mis intentos. Encontré que pegado al eje del motor al eje de la barredora fue realmente difícil, y generalmente después de algunos minutos de trabajo, se rompería, especialmente porque no hay manera para conseguirlos juntos correctamente alineado. Así que me quité de eje de reducción de los motores y coloca un engranaje pequeño pegado en el eje de la barredora. Luego coloqué el engranaje del motor en contacto con y todo funcionaba como un encanto. Sin embargo, deseo tuve una impresora 3D, las cosas serían mucho más fácil y mucho más profesional.













