




* Evitación del obstáculo
* Siguiente luz
* Alimentos buscando z (fuente de luz en este caso)
* Comportamiento de presa y depredador
* S.O.C - estado de control de carga
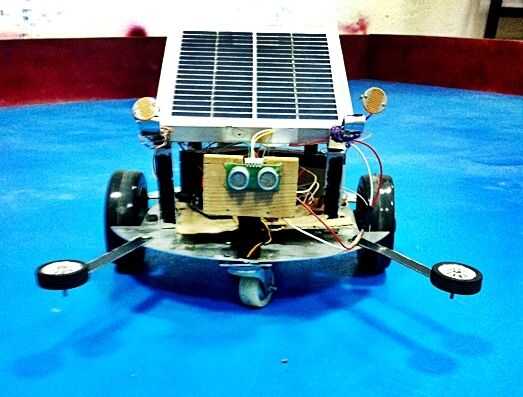
* Carga - a través de panel solar
http://www.youtube.com/watch?v=bsvpIkv4GbI
1---aquí es cómo va a trabajar, al principio cuando vas a encender este robot explorará y mapp la arena con ayuda de SONAR y servo luego lo comienza a deambular en la arena al azar, evitando obstáculos y paredes de la arena. Lo bueno de este robot es que su muy rápido en su toma de decisiones que no se detiene y análisis para decidir qué camino hacer. Su mapeo y análisis, mientras que su deambular.
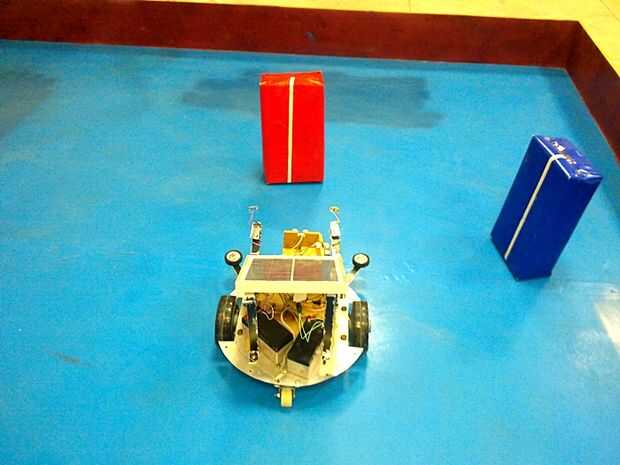
2 - que tiene 6 diferentes movimiento y planes de rodaje. Puede moverse hacia adelante puede también mover hacia atrás si el objeto está cerca o un objeto dinámico empezar a acercarse a él. Lo puede tomar 90 grados o 45 grados se enciende cada lado según la posición del obstáculo.
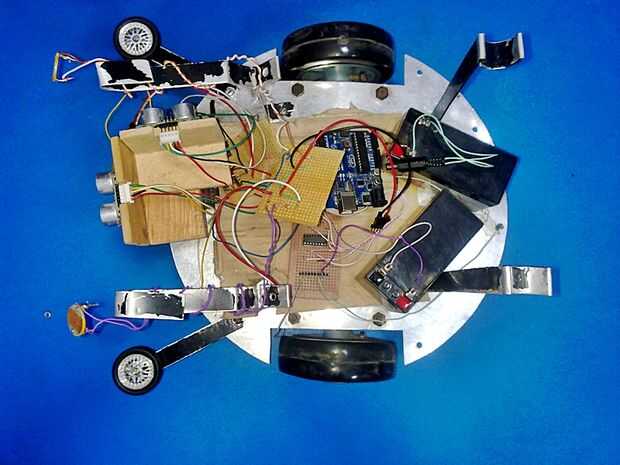
3--tan mientras que vaga su continuamente monitoreo de su estado de carga para conocer su nivel de batería que he implementado utilizando par de resistencias y de la regla de división de tensión. Y medición de la tensión usando pin analógico de arduino. Una vez que ese nivel de la batería cae por debajo de un punto que he puesto en la programación. sus cambios de prioridad y ahora empezará lookinf por su comida que en mi caso es fuente de luz.
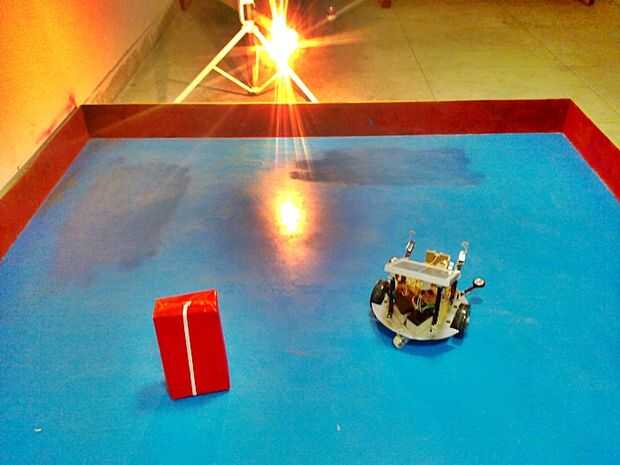
4---se moverá hacia la fuente de luz evitando obstáculos. por lo que su algoritmo complicado kindda tiene que seguir cambiando la prioridad como si vino de un obstáculo en su camino mientras buscaban la fuente de luz ahora primero tiene que evitar ese obstáculo y luego continua su búsqueda.
5 - una vez que está cerca la fuente de luz donde su conseguir el máximo de intensidad en su LDR su parada allí y se carga a través de panel solar hasta su nivel de batería es para arriba otra vez.
* El primer obstáculo que demuestra video evitando el comportamiento.
http://www.youtube.com/watch?v=O6hpfHQ-F2Y
* Segundo video Mostrar objeto comportamiento comportamiento de presa y depredador
http://www.youtube.com/watch?v=ORDur5Ghq50
* Tercer video mostrando alimento buscando beahviour.
http://www.youtube.com/watch?v=5kR4vFLT3os
* Cuarto comportamiento mostrando comportamiento siguiente luz dinámico en un cuarto oscuro.
http://www.youtube.com/watch?v=hnBy_-RD5_Q
* Quinto video muestra combinación de dos comportamientos de evitación del obstáculo + buscar alimento.
http://www.youtube.com/watch?v=D0uAAGxPiYg













