Paso 2: Cableado de los motores
Cuando comencé haciendo pedazos con Arduino y frambuesa Pi, no entiendo por qué no podían conectar motores directamente a ellos. Aquí está la explicación rápida...
Si nos fijamos en las especificaciones de un motor obtendrá información acerca de la RPM, amperaje, proporción etc.. También se incluirán un período de tensión dentro de los cuales puede operar. Para la mayoría de los motores usados por aficionados y fabricantes, este voltaje es probable que 6V o superior.
Para los motores que estoy usando en este proyecto, va a utilizar una batería de 9V. Ahora, una batería de 9V es demasiado para ejecutar el Raspberry Pi de. Lo montan los motores directamente a la RPi significa también, que las cosas poco codiciosas a intentar sacar más corriente que puede suministrar el IPC (o incluso un Arduino).
Esto puede resultar en dañar su hardware.
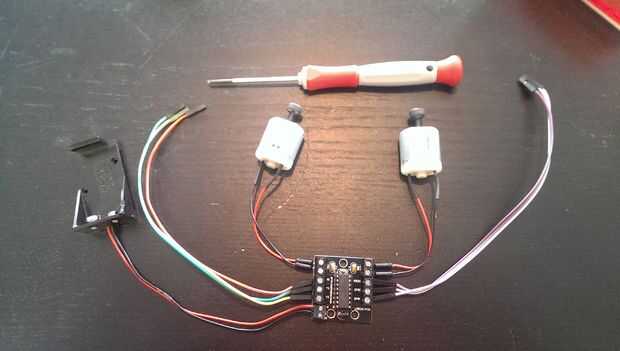
Puede alambre los motores, soporte de la batería y los cables para el L293D pcb como se muestra. La batería de 9V potencia independientemente los motores. Los motores ellos mismos se unen a los terminales marcados "MA" y "MB" en el tablero que tengo.
Los otros 3 pines (cada lado) son entradas 1 y 2 y un terminal que permite también. El terminal que podría considerarse como una especie de freno de mano, tienes que activar el motor en el canal para conducir. Los otros 2 pines son controles que determinan la dirección del motor que gira.










")
")

