Paso 1: Material necesario




Hardware:
- Arduino / clon de Arduino o hacer tu propia placa de arduino personalizado con este tutorial.
- Dos motorreductores DC como esta (Robotshop).
- Un lanzador de bola (Sparkfun)
- Dos ruedas del robot (Sparkfun)
- Chasis, generalmente hará un pequeño tablero de acrílico.
- Módulo Bluetooth HC-05 (Amazonas)
- Cuatro pilas AA y soporte de la batería.
- Controlador de Motor L293D IC
- Pequeño protoboard
- Algunas tuercas y pernos
Software:
- IDE de Arduino: Arduino
- MIT App Inventor 2
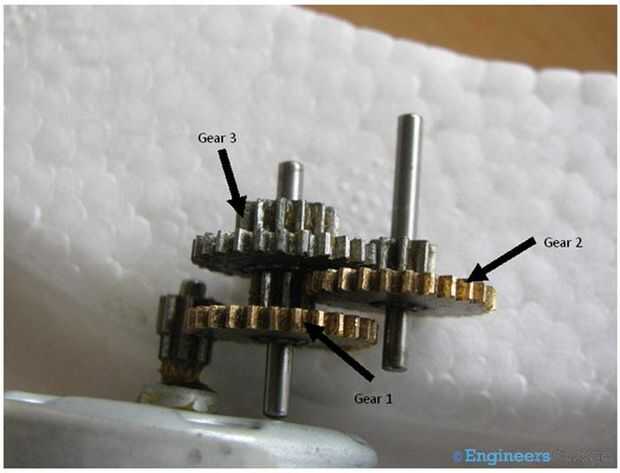
¿Por qué el Motor engranado C.C.?
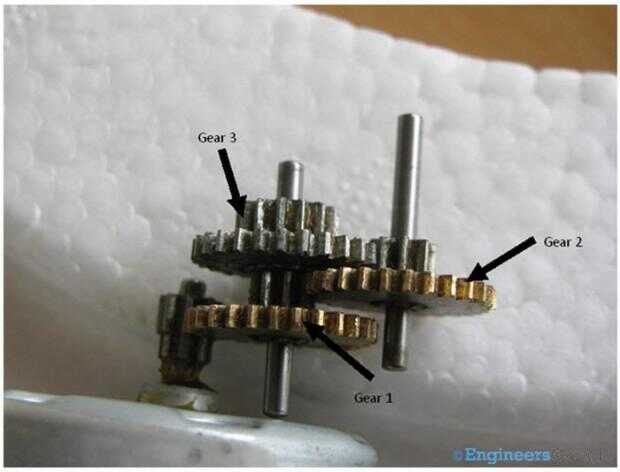
La velocidad del motor se cuenta en términos de rotaciones del eje por minuto y se denomina como RPM. Otro parámetro importante de un motor es par. Esfuerzo de torsión es una fuerza que rotor o eje de rotación. La más el esfuerzo de torsión, el eje puede girar con más carga. Generalmente un motor DC con una alta velocidad y bajo torque, que no es perfecto para aplicaciones de robótica. Más robots requieren alto esfuerzo de torsión con una velocidad baja. El conjunto de cambios ayuda a aumentar el par y reduciendo la velocidad. Usando la combinación correcta de engranajes en un motor del engranaje, su velocidad se puede reducir a cualquier figura deseable. Este concepto donde engranajes reducen la velocidad del vehículo pero aumentan su par se conoce como reducción del engranaje.
Para saber más sobre motor por favor ven mi instructables: manual de Motor completo para la robótica
Lanzador de bola
La rueda es el elemento móvil más común entre otras posibilidades, incluyendo las piernas, volar, nadar y rodar. Una rueda proporciona menos velocidad, exactitud y estabilidad para un robot, tres características muy importantes en el diseño y construcción de robots. Encontrando inspiración en todo, los investigadores diseñan muchos tipos de ruedas incluyendo estándar, orientable, pelota y las ruedas omnidireccionales.
Dependiendo del diseño y requisitos, ruedas estándar se utilizan especialmente para los métodos clásicos de la conducción y dirección mientras orientable y ruedas de bola están incluidas en la misma categoría y usuario para el equilibrio de un robot.
Un lanzador de bola es un tipo de 'rueda' que permite un desplazamiento suave en todas las direcciones. Lanzador de bola funciona como las ruedas omnidireccionales y son muy buenas para conducir y manejo y se usan cuando el robot debe tener la capacidad para moverse en todas direcciones. La bola puede ser construida de metal o plástico y se coloca en el marco de un titular.
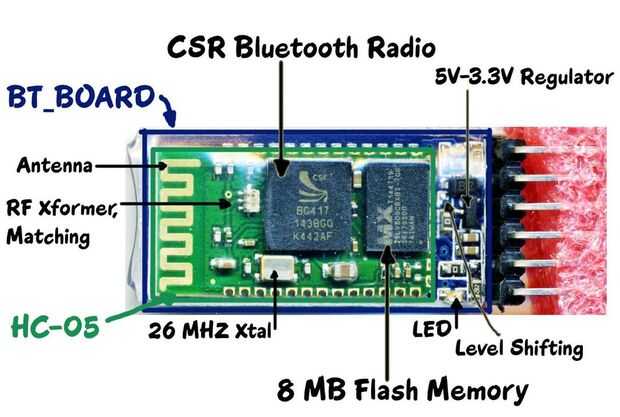
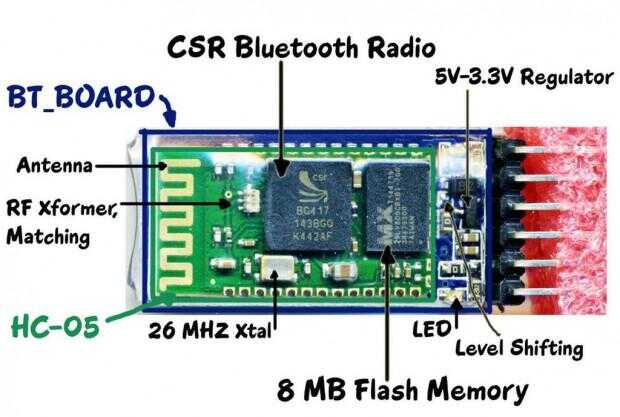
Módulo Bluetooth HC-05
Bluetooth es una tecnología inalámbrica estándar para intercambio de datos sobre distancias cortas (mediante ondas de radio de onda corta UHF en la banda ISM de 2.4 a 2,485 GHz) desde dispositivos fijos y móviles y construcción de redes de área personal (cacerolas). Gama es aproximadamente 10 metros (30 pies).
Los módulos de Bluetooth HC-05 se basan en el chip de Cambridge Silicon Radio BC417 2,4 GHz BlueTooth Radio. Se trata de un complejo chip que utiliza un 8 Mbit flash memoria externa (hoja de datos). Estos submódulos de bajo costo Bluetooth funcionan bien con Arduino y otros microcontroladores como maestro o esclavo. El módulo tiene dos modos de funcionamiento, modo de mando donde podemos enviar comandos a él y datos donde transmite y recibe datos a otro módulo de bluetooth.
El módulo tiene dos modos de funcionamiento, modo de mando donde podemos enviar comandos a él y datos donde transmite y recibe datos a otro módulo de bluetooth. El modo predeterminado es el modo de datos, y esta es la configuración predeterminada, que puede funcionar bien para muchas aplicaciones:
Velocidad en baudios: 9600 bps,
Datos: 8 bits, Bits de parada: 1 bit, paridad: ninguno, apretón de manos: ninguno
Contraseña: 1234
Nombre de dispositivo: HC-05
Para saber más detalles sobre visita de HC-05 módulo: arduino-info.wikispaces.com
¿Por qué Motor Driver?
¿Podría te acuerdas de capacidad de corriente máxima de un perno de la entrada-salida de Arduino? Sí, capacidad de corriente máxima de un pin de I/O de arduino es de 20 mA. ¿Podría usted imaginar, cuanta corriente un motor de CD simple puede dibujar? Un motor de CD simple 5V puede tomar más de 200mA, 10 veces más grande que un pin del arduino puede manejar en forma segura. Así que, ¿cómo podemos manejar un motor DC usando arduino? Sí, tienes razón! Tenemos que usar el transistor entre motor de pin un DC de arduino para conducir con seguridad un motor DC usando arduino u otro microcontrolador.
Motores de corriente continua normalmente tienen sólo dos cables, uno positivo y uno negativo. Si estos dos conductores se conecta directamente a una batería, el motor girará. Si cambia los cables, el motor girará en la dirección opuesta.
Si desea ejecutar un motor de corriente continua en una sola dirección sólo de lo que utiliza un único transistor. Pero tienes que correr un motor DC en cualquier dirección que usted tiene que utilizar 4 transistores en H igual manera generalmente se llama puente en H. Un puente de H puede controlar la dirección de giro de motor de corriente continua, sin cambiar la forma en que los cables están conectados. Puentes H se utilizan en muchas aplicaciones diferentes, entre los más comunes para control de motores en robots. Se llama un puente de H porque utiliza cuatro transistores conectados de tal manera que el esquema se ve como un "H." Usted puede utilizar transistores discretos para hacer este circuito, pero hay paquete de puente H IC. Un IC más común del puente H es L293D ampliamente utilizado en robótica.
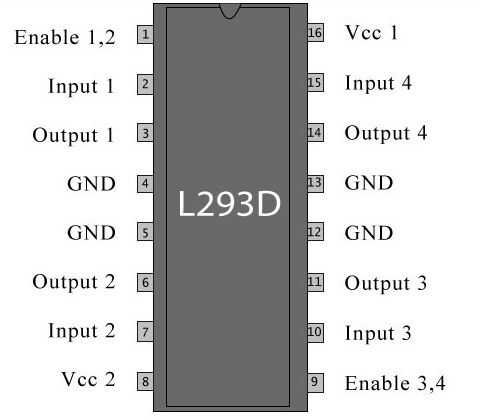
Controlador de Motor L293D IC
L293D es un CI de 16 pines que puede controlar un conjunto de dos motores al mismo tiempo en cualquier dirección. Esto significa que usted puede controlar dos motor de CC con un solo IC L293D. El l293d coche pequeños y tranquilos grandes motores así. Hay dos pernos permiten el l293d. Pin 1 y pin 9, para poder conducir el motor, el pin 1 y 9 deba ser alta. Para conducir el motor con el puente de H izquierda necesita activar pin 1 a alto. Y derecha H-puente necesita realizar el pin 9 en alto. Si alguien del sea pin1 o pin9 baja entonces el motor en la sección correspondiente será suspender el trabajo. Es como un interruptor. Velocidad de un motor puede aumentarse o disminuirse de continuo dando señal alta y baja para activar el pin. Generalmente, conectamos el pin enable del IC a un pin de salida PWM de Arduino.
Hay 4 pines de entrada para el l293d, pin 2, 7 a la izquierda y el pin 15, 10 a la derecha como se muestra en el diagrama de pines. Pines de entrada izquierdos regula la rotación del motor conectado en la parte izquierda y derecha entrada para motor en el lado derecho.
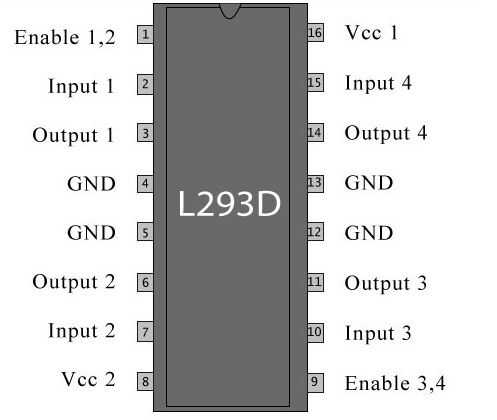
Tabla lógica
• Pin 2 = lógica 1 y Pin 7 = lógica 0 | Dirección a la derecha
• Pin 2 = lógica 0 y el Pin 7 = lógica 1 | Agujas del reloj
• Pin 2 = lógica 0 y el Pin 7 = lógica 0 | Idle [No rotación] [Estado de alta impedancia]
• Pin 2 = lógica 1 y Pin 7 = lógica 1 | Idle [No rotación]
Especificación de tensión
Vcc1 es el voltaje que necesita para su propio funcionamiento interno 5v; L293D no utilizará este voltaje para conducir el motor. Para la conducción de los motores tiene una disposición separada para proporcionar el motor fuente Vcc2 (pin 8). L293d esto utilizará para conducir el motor. Significa que si quiere hacer funcionar un motor de 9V entonces usted necesita proporcionar una fuente de 9V a través de suministro Motor Vcc2.
La tensión máxima de alimentación motor Vcc2 es 36V. Se puede suministrar una corriente máxima de 600 mA por canal. Ya que pueden manejar motores de hasta 36V por lo tanto puede conducir motores bastante grandes con este l293d. Pin 16 de VCC es el voltaje para su propio funcionamiento interno.
")










 mediante bluetooth")

