Paso 4: Esquema y composición
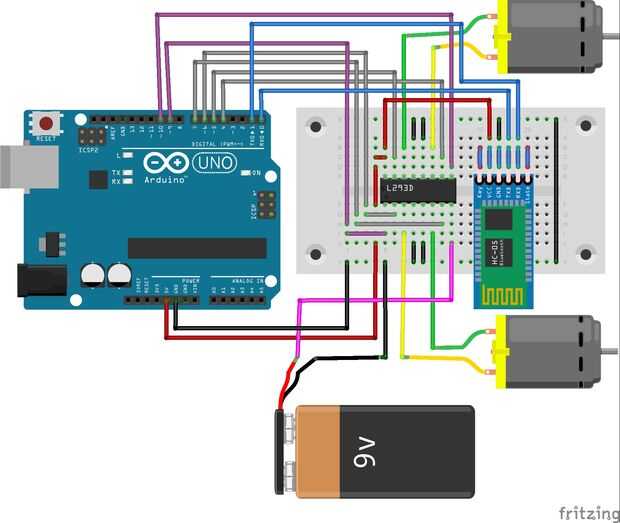
Conexión del circuito es muy simple para el robot. Necesitamos dos conectarlo a Arduino usando puente H controlador de motor L293D IC. L293D tiene 16 pines. Tiene 6 pines de entrada para los dos motores. Conectar dos pernos permiten con dos pasadores de pwm de la placa arduino. Conecte el otro de 4 pines a cualquier 4 pines digitales del arduino. No olvide cambiar el sketch de arduino en consecuencia. Ahora conecte 4 pines de salida del CI a dos motores. Se completa la conexión de nuestro motor. Ahora conecte 9 V batería al Vcc2 pin (pin 8) y el pin de arduino 5 V al Vcc1 pin (pin # 16) de la IC. Hacer una conexión de tierra común entre batería, tablero del IC & arduino. Es muy importante.
Ahora, es el momento para conectar el módulo bluetooth a la placa arduino.
HC-05 es un módulo de puerto serie que es muy fácil de usar. Si ves la configuración de pines de HC-05, hay 6 total pero sólo necesitamos 4 los mediados para nuestra configuración.
- Conectar VCC con 5V de Arduino
- Conectar toma de tierra con cualquier GND de Arduino
- Conectar el pin Rx con Tx del Arduino
- Conectar el pin Tx con el Rx del Arduino
¿Conexión RX y Tx es un poco confuso? La cuestión es que los datos transmitidos por el pin de Tx del arduino es recibidos por bluetooth módulo recibe pin (Rx). Por la razón de arduino Tx es connectd bluetooth Rx perno y así sucesivamente.
Ahora encienda el Uno mediante cable USB, una luz roja LED en HC-05 empezará a parpadear, significa que estamos listos para avanzar al siguiente paso!
")










 mediante bluetooth")

