Paso 3: Softwere

Antes de cargar el programa en primer lugar tenemos que asociar el módulo de Bluetooth a su ordenador portátil
Siga los pasos simples como se muestra en la imagen...
Conecte el módulo de Bluetooth a arduino para pelado
las conexiones de perno es...
Arduino + 5v === módulo Bluetooth Vcc
Arduino Gnd === módulo Bluetooth Gnd
TX del Arduino === Bluetooth módulo RX
RX del Arduino === Bluetooth módulo TX... y luego empezar su ordenador portátil
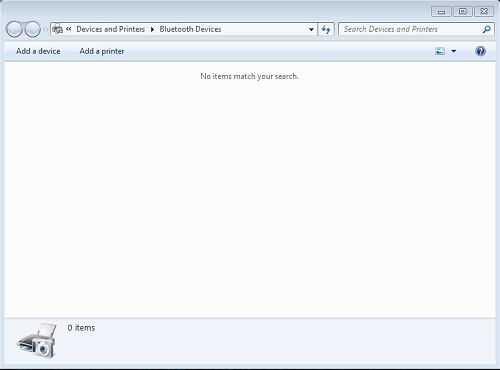
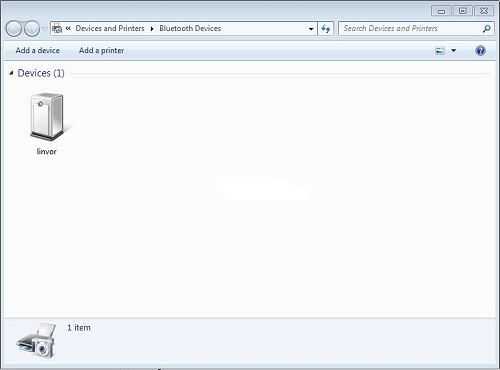
1. una vez que ha hecho esto, inicie haciendo clic derecho el icono de Bluetooth en la bandeja del sistema y seleccione "Dispositivos Bluetooth" para que aparezca la ubicación de los dispositivos Bluetooth
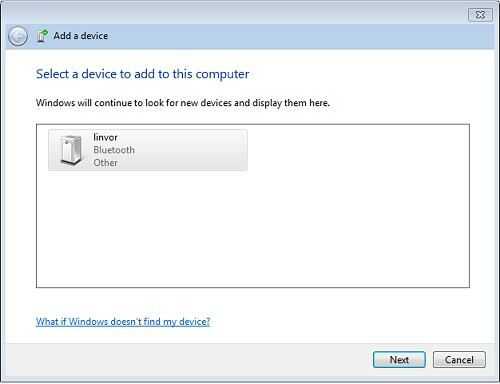
2. Haga clic en el botón "Agregar un dispositivo" y windows buscará dispositivos bluetooth activos. Deben traer el siguiente dispositivo bluetooth.
3. Seleccione linvor y haga clic en siguiente
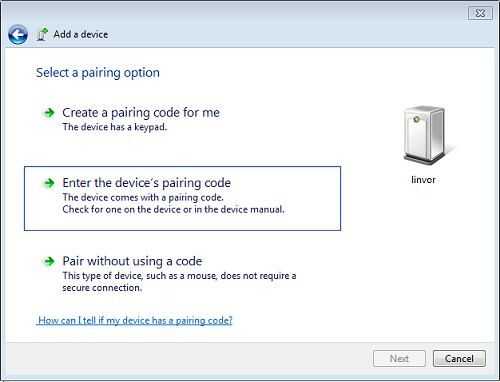
Se le pedirá que seleccione una opción de sincronización. Seleccione la opción "Enter el dispositivo emparejado código"
4. cuando se le solicite, introduzca el código 1234 (otros módulos bluetooth que tenga códigos diferentes)
El dispositivo ahora debería añadirse con éxito a la computadora
5. Haga clic en "Cerrar" para volver a la lista de dispositivos Bluetooth.
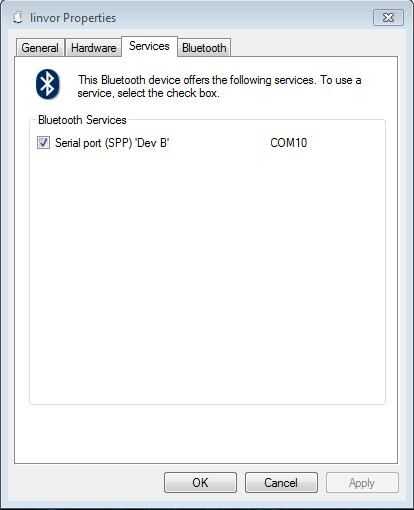
Haga clic derecho sobre el dispositivo de linvor y seleccione "Propiedades"
6. Haga clic en la pestaña servicios y usted debería ver el servicio de puerto serie con un número de Puerto
7 abrir su programa favorito de terminal (hemos utilizado TeraTerm) y cambiar el puerto al que se muestra.
Establecer la velocidad en baudios de 9600 (suponiendo lo cambiaron, esto es el valor predeterminado para este módulo. Otros módulos pueden tener diferentes valores predeterminados)
Después de ese archivo de controle.exe bt... ir a > confi... ficha > y seleccionar su moduel BT > Puerto... y abrir el puerto
una vez que usted hace que ir al controlador e iniciar robot y empezar a controlar...






")







